Overview
During a recent experiment with the model “Sky Fury,” a VTOL using PX4, it suddenly spun and crashed in MR Mission mode. We suspect a failure in rotor 3, but the exact cause remains unclear. Additionally, the battery current was abnormally low. We would appreciate any insights or suggestions to help resolve this issue.
Test Specifications
-
Model: Sky Fury
-
Configuration: Standard VTOL
-
Controller: CubePilot Cube Orange+
-
Firmware: PX4 v1.15.2 (self-compiled with adding
vehicle_commandandmission_resulttopics indds_topics.yaml) -
Computer OS: Ubuntu 20.04
-
ROS Version: ROS2 Foxy
Crash Process
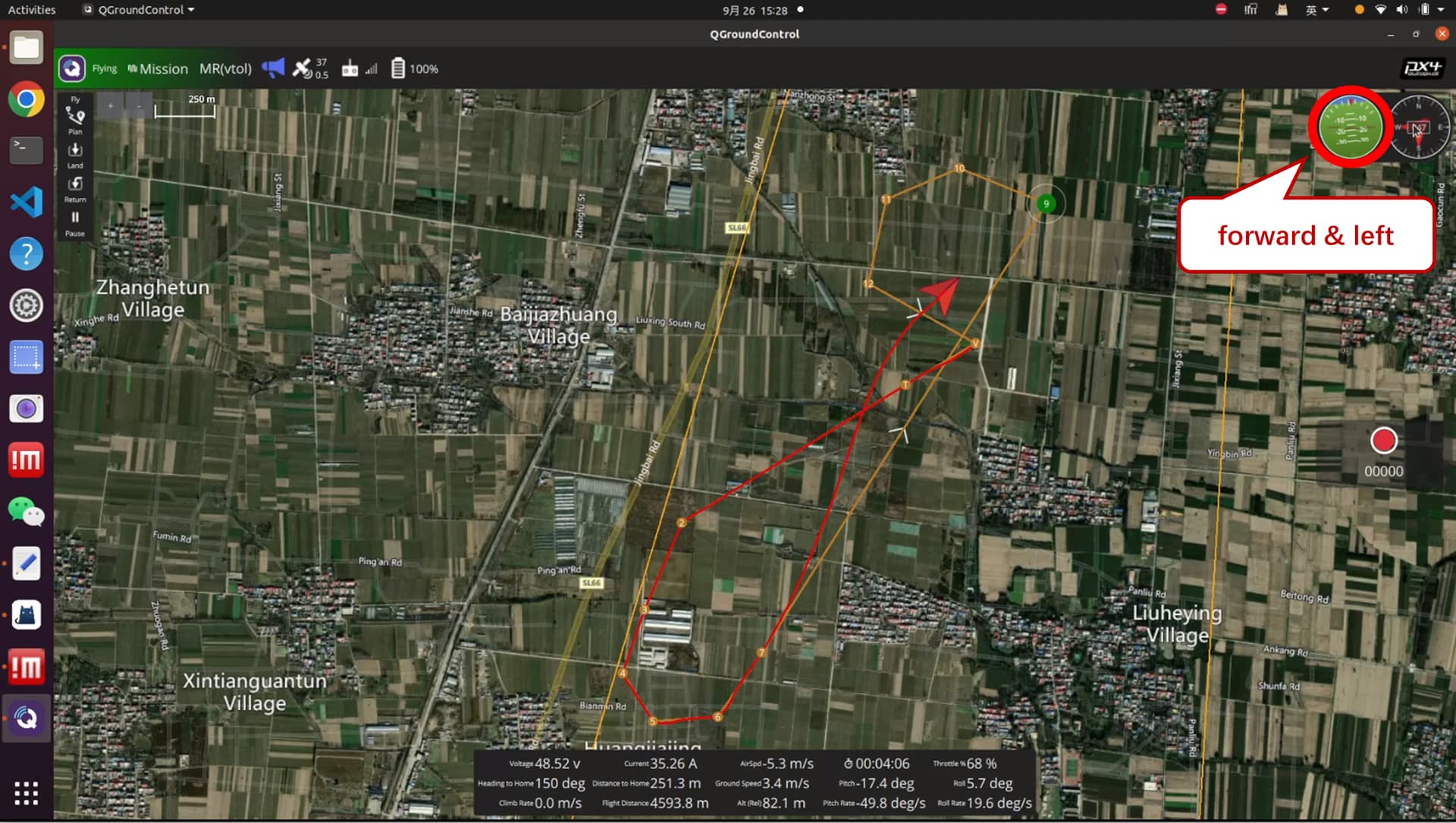
After completing an offboard flight test, the vehicle switched to MR Mission mode. During ascent at 92m, the roll angle suddenly increased, leading to the crash.
Here are the ulog analysis, QGC recording, and flight video. We hope these materials can provide some clues.
Ulog analysis
QGC recording
Fight video
Crash analysis
-
From the crash video, it can be observed that when the aircraft began to fall, it tilted forward to the left and started rotating counterclockwise.
-
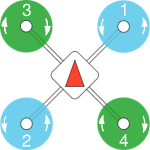
According to the quadrotor motor rotation direction diagram, this phenomenon occurs when the speed of motor No. 3 decreases.
-
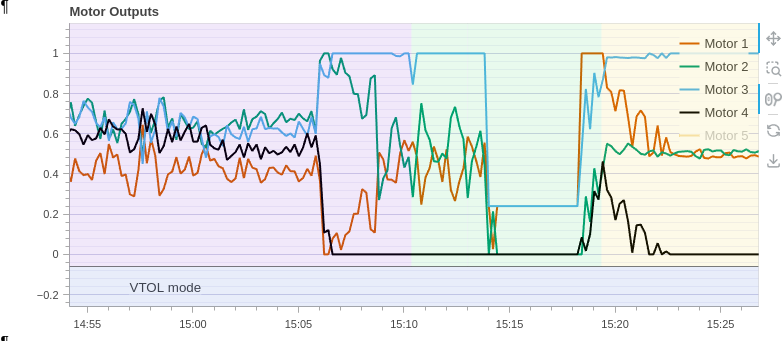
From the motor data in the flight log, it can be seen that the crash occurred between 15.06 s and 15.14 s.
-
The PX4 flight controller attempted to maintain stability by increasing the speeds of motors No. 2 and No. 3. Expected the VTOL to roll right.
-
The command for motor No. 3 remained at its maximum value, but the motor did not respond.
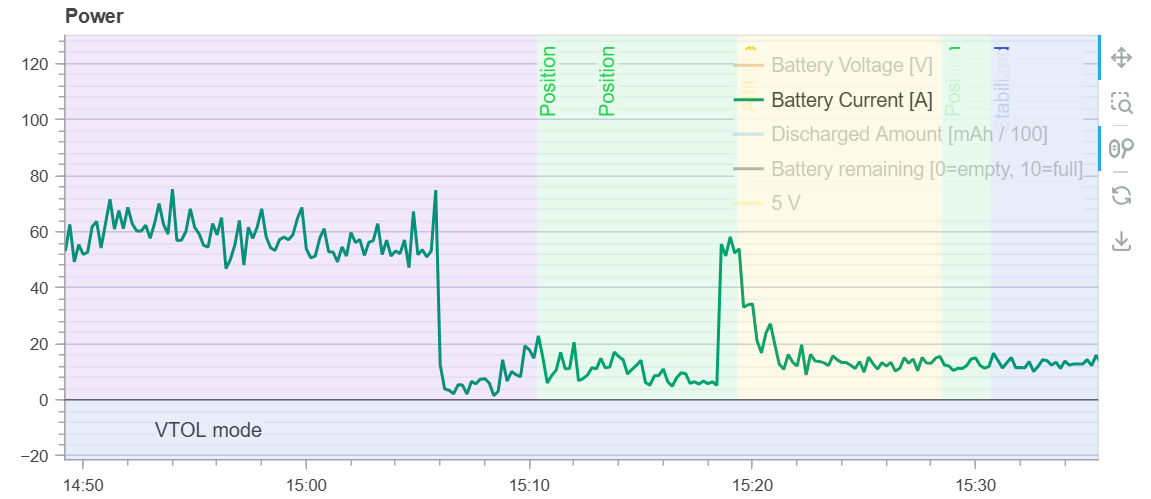
- The battery current dropped to a very low level during the crash.
Confusion
- Did Motor 3 actually fail?
- What’s the most likely cause of this failure - overheating-induced disconnection or other reasons?
- Why was the current abnormally low at the end?
- Is there a relationship between the current anomaly and the motor issue?