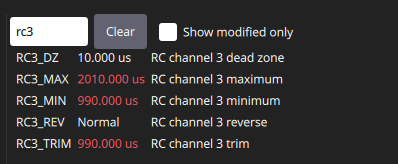
After my radio callibration, these are the values for the throttle channel that I get.
During testing, when I arm and start moving the throttle, the drone motors spin at the same speed not until I exceed the mid position. I think this is why the drone is not taking off.
Please provide some solutions