Hi, I am a new 4-rotor px4 drone flier and trying to get my first flight. Unfortunately, when I take off the drone, it’s always drifting to the backward. I’ve been trying to find any possible problem.
- Checked balance - battery is centered, nothing else seems to be assymetrical
- Recalibrated sensors (many times)
But it looks like when I simply command throttle up, the motor will not rotate balance.
here is the log:https://review.px4.io/plot_app?log=cf096fa9-625e-4568-9d38-561a97c9fbc3
what problem should I solve?
Begging for help
thanks,
Liu
Try using roll, pitch, and throttle simultaneously. This is not a stable drone like DJI. You have to fly and set the PID gain. If it is always pitching up before taking off, give a little pitch-down movement and a little throttle.
Thank you! I will try it immediately.
By the way, is it possible to set it offset to pitch down to balance?
Trimming pitch down from your RC control is possible, but it is not required for the first few flights. Try to fly and tune the PID gain. I assume you have followed all the steps mentioned in the PX4 documentation.
Hi @LIU7790 ,
Without being certain, I’d say the easiest thing to try first is to re-calibrate your Radio Controller.
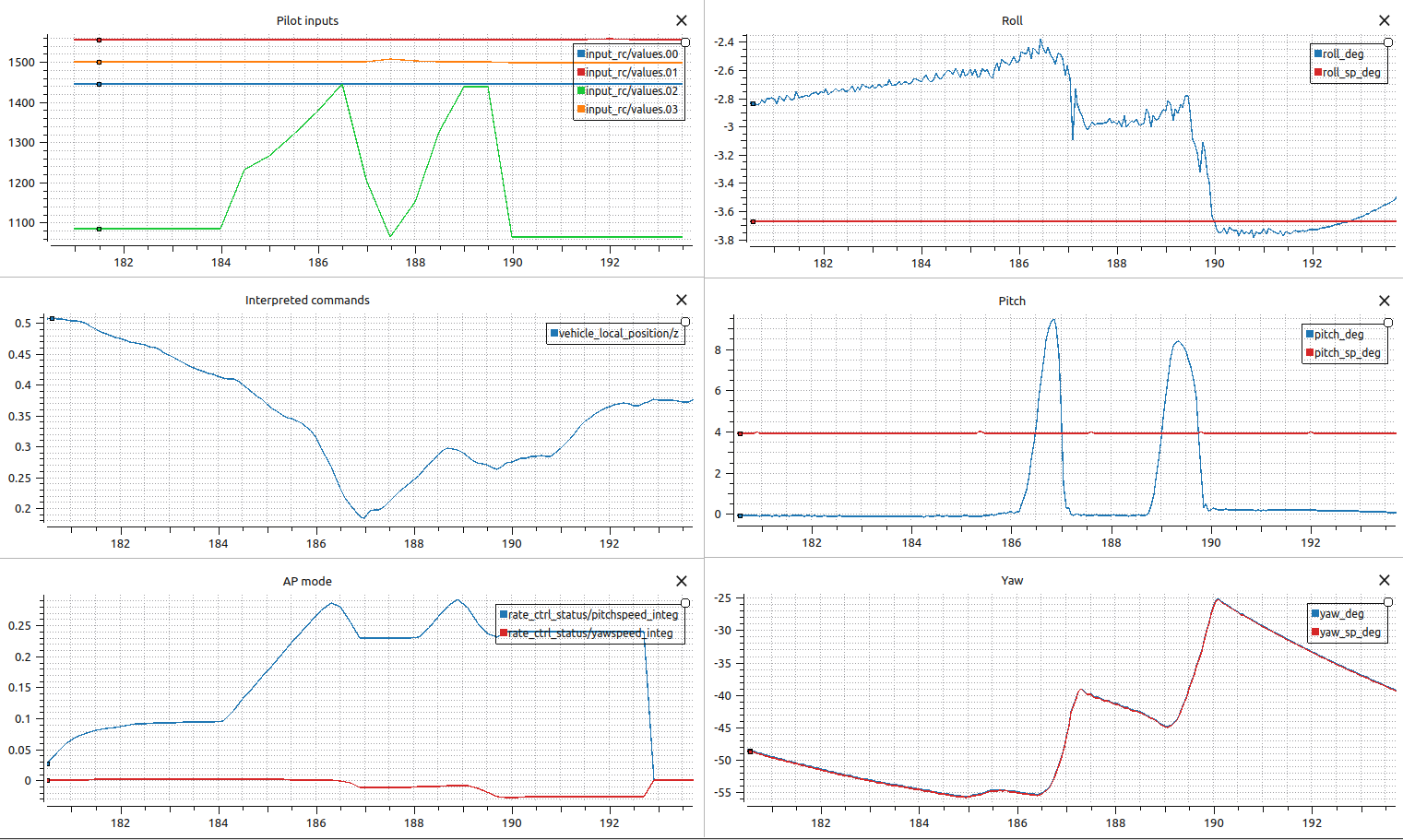
In the log it seems that your roll and pitch sticks are not reading “zero” right before you take off. The roll setpoint is actually -3.7deg and pitch setpoint is 4 deg.
You take off gradually and the angular rate integrators have time to wind up and overshoot the setpoints when you lift off. Perhaps an aggressive tuning is also the case here.