I am currently running a default tiltrotor firmware (Generic Tiltrotor VTOL), Sys_autostart :13100 for my project. I was able to make the tiltrotors move for my yaw in multicopter mode but I am currently unable to do so for my pitch. Please advise me regarding this issue. Thanks
You can also active forward acceleration through tilt by setting VT_FWD_THRUST_EN correspondingly, but pitch rate control through tilting is not currently supported out of the box (I think). How does you actuation setup look like that you would need that?
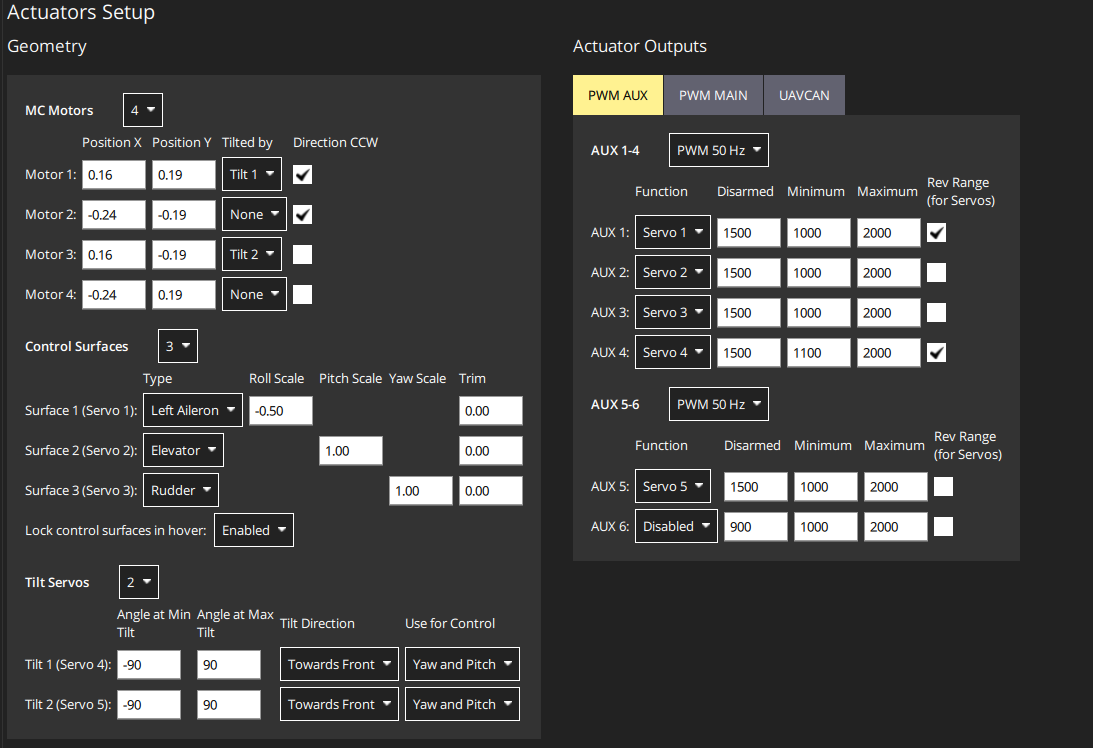
Hi sfuhrer, this is my current actuator output. I am trying to get controls for pitch via the tiltrotor. Current my tilt servo does not work for my pitching controls