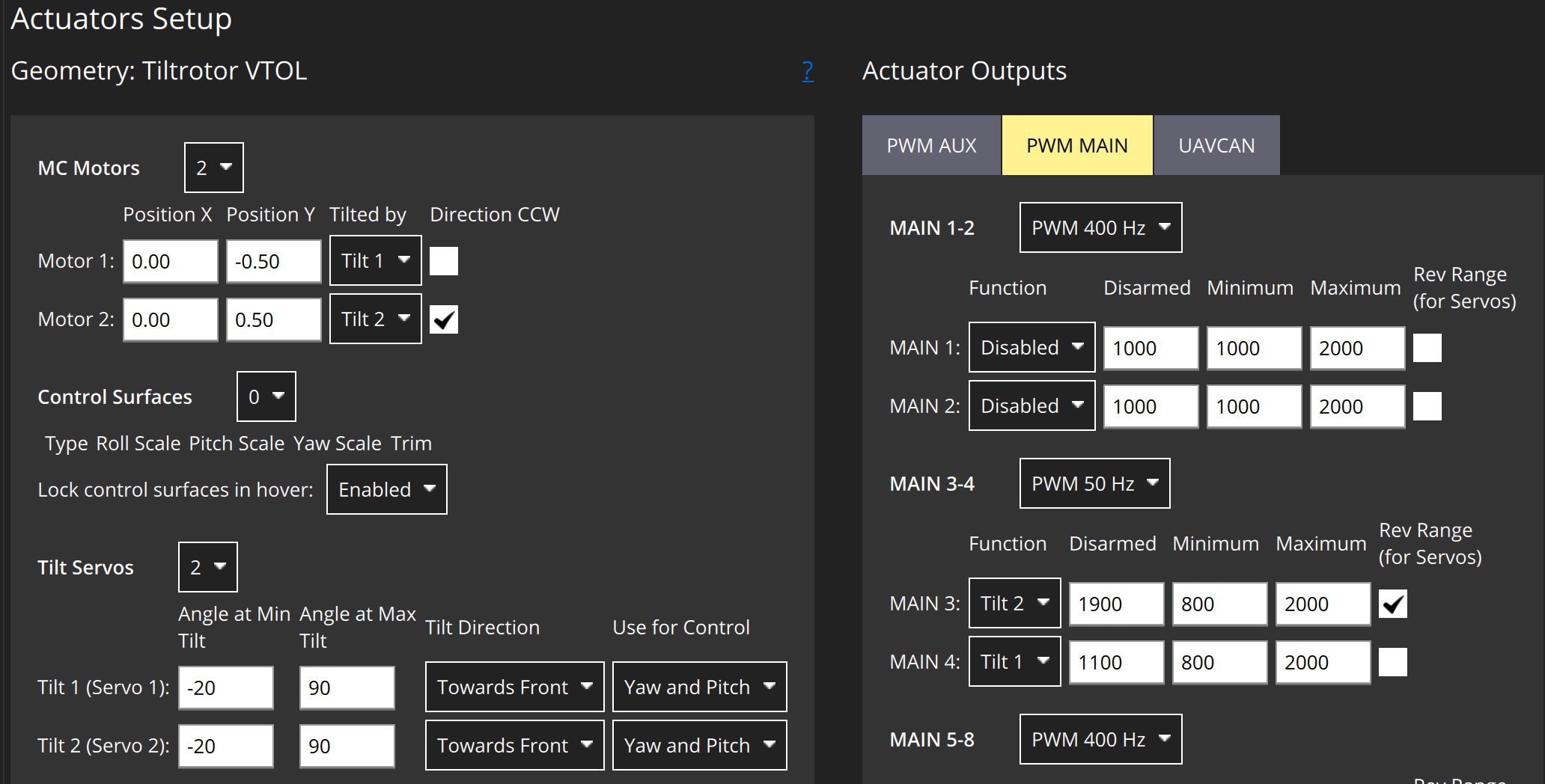
I am trying to build a Tiltrotor VTOL in bicopter configuration with no control surfaces.
Just have two motors and two tilt servos attached to the wing tips.
I am fairly new with the PX4 autopilot and tried a quick configuration to see what can I possibly achieve with this great firmware.
I am doing some test runs in altitude mode, indoors, without propellers and the problems I am having:
I arm the vehicle and increase throttle stick. If I turn the vehicle in the yaw axis by using my hand, the tilt servos move to counteract the movement. If I move the vehicle in the roll axis, again with my hands, the thrust of the motors change to counteract the movement. However, if I move the vehicle in the pitch axis, the servos does not move, remain still in contrast to my expectation.
If I move the elevator stick forward, the tilt servos lean forward as expected. But If I move the stick backward, the two motors increase throttle and the servos do nothing.
I’m really interested in how you managed to solve this issue with the “pitch by tilt” control. If it’s not too much trouble, could you kindly explain how you approached it and what changes you made in the PX4 code? I’d love to learn more about the solution. Thank you!