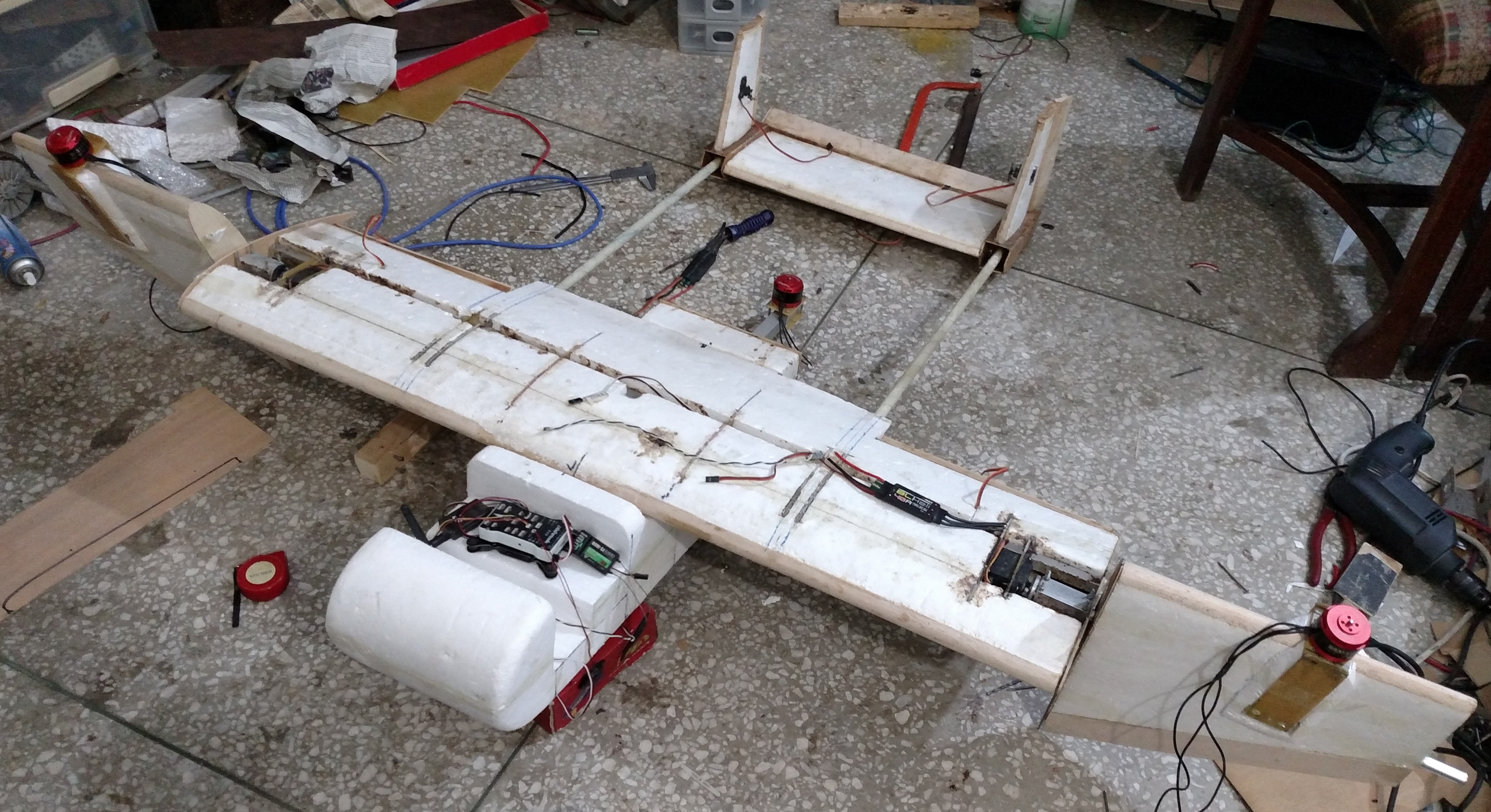
hi , we are making a bi copter tiltrotor for university project and needed some help with configuration ,
actually it was a tricopter style vtol but we have since removed the rear motor as it was useless because of the c.g position
we started with capirinha vtol airframe configuration as it is similar to our airframe and there are a few things we are stuck in
as capirinha vtol is a tail sitter it would tilt on pitch axis in transition , in our air frame we are tilting motors so we dont want that to happen , where can we change this ?
how to change the default positioning of tilt motors in f.w and m.c mode ?
any help will be appreciated , our project is due in a few weeks
ok i have switched back to convergence (what we were using before removing rear motor) , i have edited the mixer file to remove pitch control from motors and everything is working as it should
the problem now is that when it takes off in MC mode it pitches forward continuously
the tilt servos are limited to 90 deg rotation so they cannot counter forward pitch in hover , can you tell me how to remove / increase this limit
Tiltrotor VTOLs are currently fixed multicopters with the props up, then rotate the motors forward for fixed wing flight. If you want tilting for multicopter stabilization it’ll need to be added. We could discuss it on gitter or skype if you’re interested, but it’ll take a little bit of development work and testing.
Hi, I’m working on a dual-copter and unfortunately there seems to be no standard firmware for such a craft. two motors using only tilt and thrust for control. Was there any progress with this project?
Cheers.