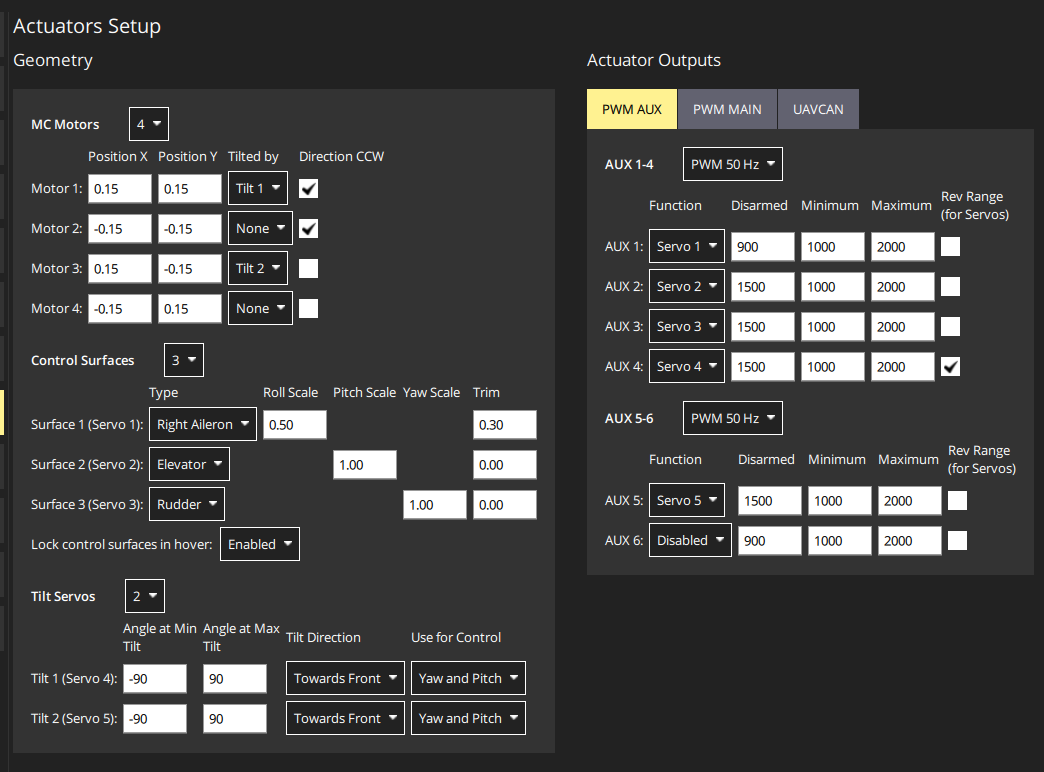
Hi all,
I have currently current this setup for my tiltrotor vtol, currently the tilt servos movings when i give a yaw input from my rc but the servo does not move when i give a pitch input. Does anyone know the reason as to why this happen?