Hi Guys.
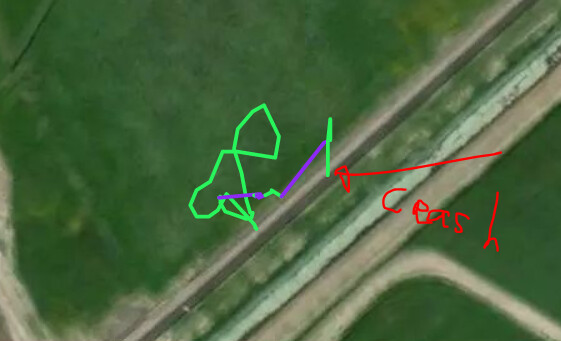
I recently had a crash with my px4 and X500 frame. The drone suddenly fell out of the air (at a approx 5-7 m altitude). It might be caused by myself, that I accidentally pulled the emergency kill switch on the RC controller.
I want to investigate what happened by looking at the log file. See picture below when crash happened. I cant really find in the log file what the issue was. Can someone help me find the issue?
Here is the log file:
https://logs.px4.io/plot_app?log=f34ff8d5-252b-4727-86b9-5c173ed9dc3f
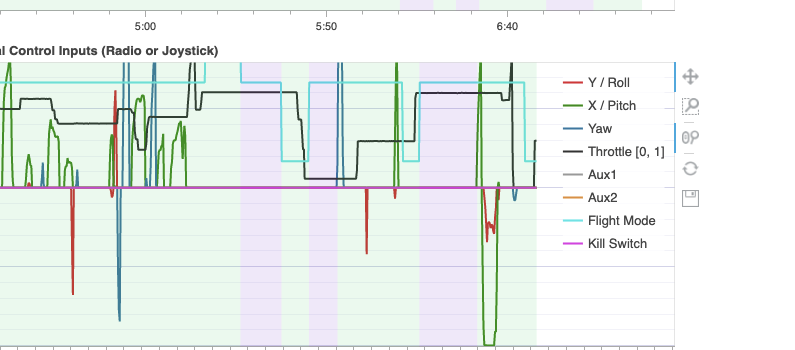
The log indicates that you did not use the kill switch.It do does seem to show that the throttle went to 0.
I can’t say if this caused the crash. What is “Follow Target” flight mode?
Throttle goes to 0 :
Hi, thanks for the reply. Ok, good to know kill switch wasnt activated. Wondering why throttle is zero and if that matters? In general I think no throttle is OK, with zero throttle it should descent, not fall out of the sky. Follow me is this flight mode were the drone should follow the user based on phone GPS signal, was the first time I tried this mode and did not seem to work. Hereby also a link to the onboard video made:
Seems like I hear some beeps during fall of drone, so that would mean system is still active but for some reason motors shut down…
Those beeps could also be the ESC or the PX4. You should see if you can decode them.
Well putting the throttle to 0 will make you crash. Hard to say at such a short distance if it was just descending or crashing,
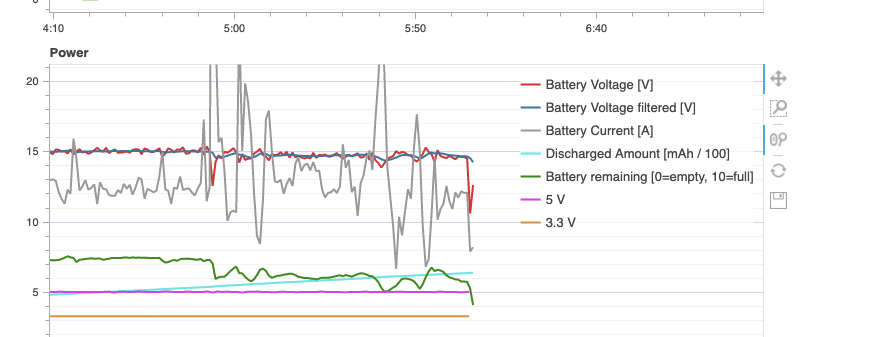
But look here, how low was your battery? See how the red line dives as does battery remaining.
Any chance the battery has a bad cell? I have had batteries just suddenly dump when bad. They seemed fine until the weren’t.
Hm well have been flying fine with this battery so far, but I ll keep an eye on them from now on. Thanks!
Hi,
Today tried again and in general it flew good, but in the end during flight it crashed again. This happened when I gave drone quite a bit of roll angle. This time battery voltage curved seems good and I dont really understand why motors were turned off again… any advice? it seemed roll angular rate during crashed was around 65 deg, but roll angle max ~25 deg. Is it possible the attitude failure flag was initiated? there is: Parameter Reference | PX4 User Guide ( FD_FAIL_R (INT32)) → 60 deg it seems to be max, but this is on roll not on roll angular rate I assume. The angular roll rate was higher than 60 earlier in my flight too and nothing happened then.
YT link: https://youtu.be/0DnKKzjY2oE
LOG file: https://logs.px4.io/plot_app?log=7017c3d7-9606-427a-9c70-21b9399aca6c
Crashed happened around 10:27.
I assume it was indeed the 60 deg parameter in PX4. I recommend increasing this default parameter to 80 - 90 deg and use a kill switch to be switched manually in case of a crash to minimize breaking props.