Hello, could anyone advise on a likely cause of a crash, where the drone appeared to fall from hovering in Altitude mode? I’m using release v1.13.2 with a Cube Orange on a large, spiral arm configuration hexarotor.
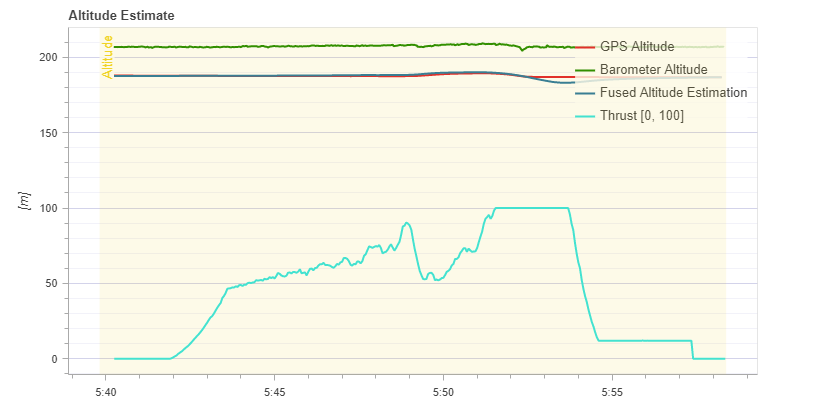
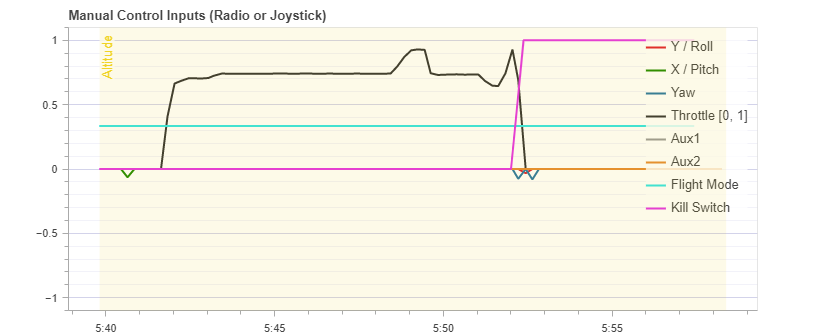
Something that puzzles me is the thrust plot below, where at around 5:51 manual RC throttle is decreased, but thrust is instead increased (and continues to increase and stay there).
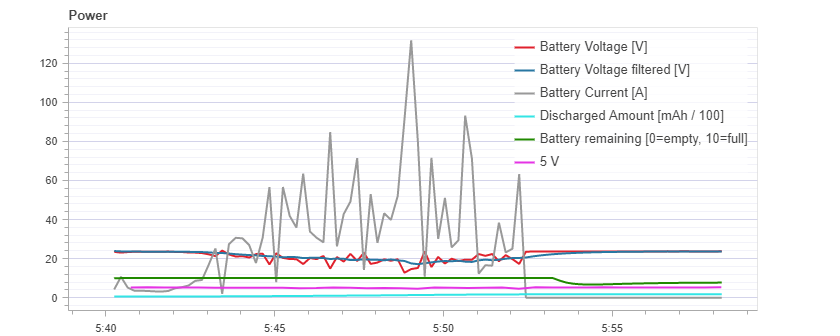
Another area of concern is the Power plot which I believe may have also played a role in the crash, notably the current (voltage sag is an issue I’m aware of). I’m not sure if this fluctuation is normal, given the largest difference is well over 100A.
Lastly, a glance at the PID-related plots in Flight Review indicate manual tuning is needed, but I’ve yet to determine if that was a factor in the crash.
Any advice on any of the plots is appreciated and would help greatly!
Sorry about the crash! I’m a bit confused looking at this but my best guess is that it was fighting a yaw imbalance which meant it had to speed up 3 motors (to the max) and reduce the other 3 quite considerably, at which point it didn’t have enough overall lift.
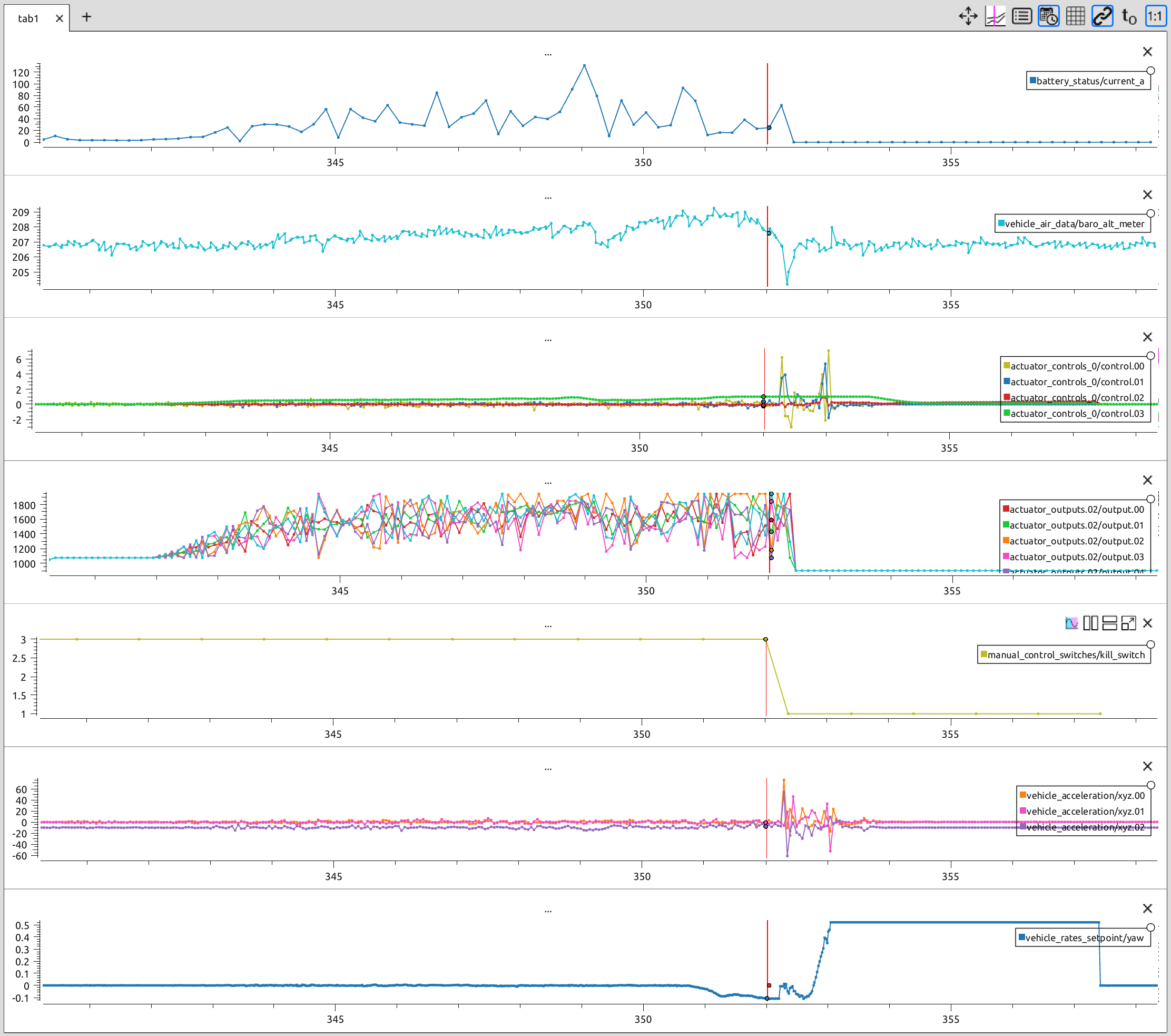
If you look at the logs below you can see that, from top to bottom:
Current consumption went somewhat down when it came down, as you pointed out.
The baro altitude for reference when it came down.
Thrust (in green) is at the max, so it’s trying to stay up. I’m not sure why the yaw control doesn’t really show up here.
3 actuators at full throttle, 3 quite low.
Kill switch which explains the outputs stopping.
The acceleration to know when it hit the ground.
The yaw rate setpoint happening at the same time as it comes down.
When it came down, did you see that 3 motors were going fast and other 3 were not? That’s usually noticeable. Also, do you generally have good yaw control or not? And lastly, what is the tilt of the motors? Worst case they (or some of them) are slightly tilted against the yaw effect that they should have, in between would be exactly vertical, and best case they are slightly tilted to help with yawing.