Hi.
I have a similar sounding issue to another topic, but there is no response yet:
As I am using different flight modes and a different build I posted this as a new topic.
flight logs:
- almost crash (https://logs.px4.io/plot_app?log=25ffbf0d-1d0a-4f77-a192-d2cef703da3d)
- 2nd try with same mission, inconspicious (https://logs.px4.io/plot_app?log=8dd23aa3-a614-4918-892c-29faaa3bdc94)
description
this is my first self-built drone with my first FC. I am using pixhawk v5 with firmware 1.8.2 as can be seen in the lfight logs as well(Redirecting to latest version of document (master)). I am just getting started with the drone and step by step testing out different functions. I tried several flight modes and configurations (stabilize, altitude, position, RTL, kill switch function, and mission, battery settings, fail safes).
I did not optimize the controllers yet.
I noticed in several flight modes “twitching” of the quadcopter in flight and pretty slow control response times, however I held off (Redirecting to latest version of document (master)) being confident to tune the system at a later point.
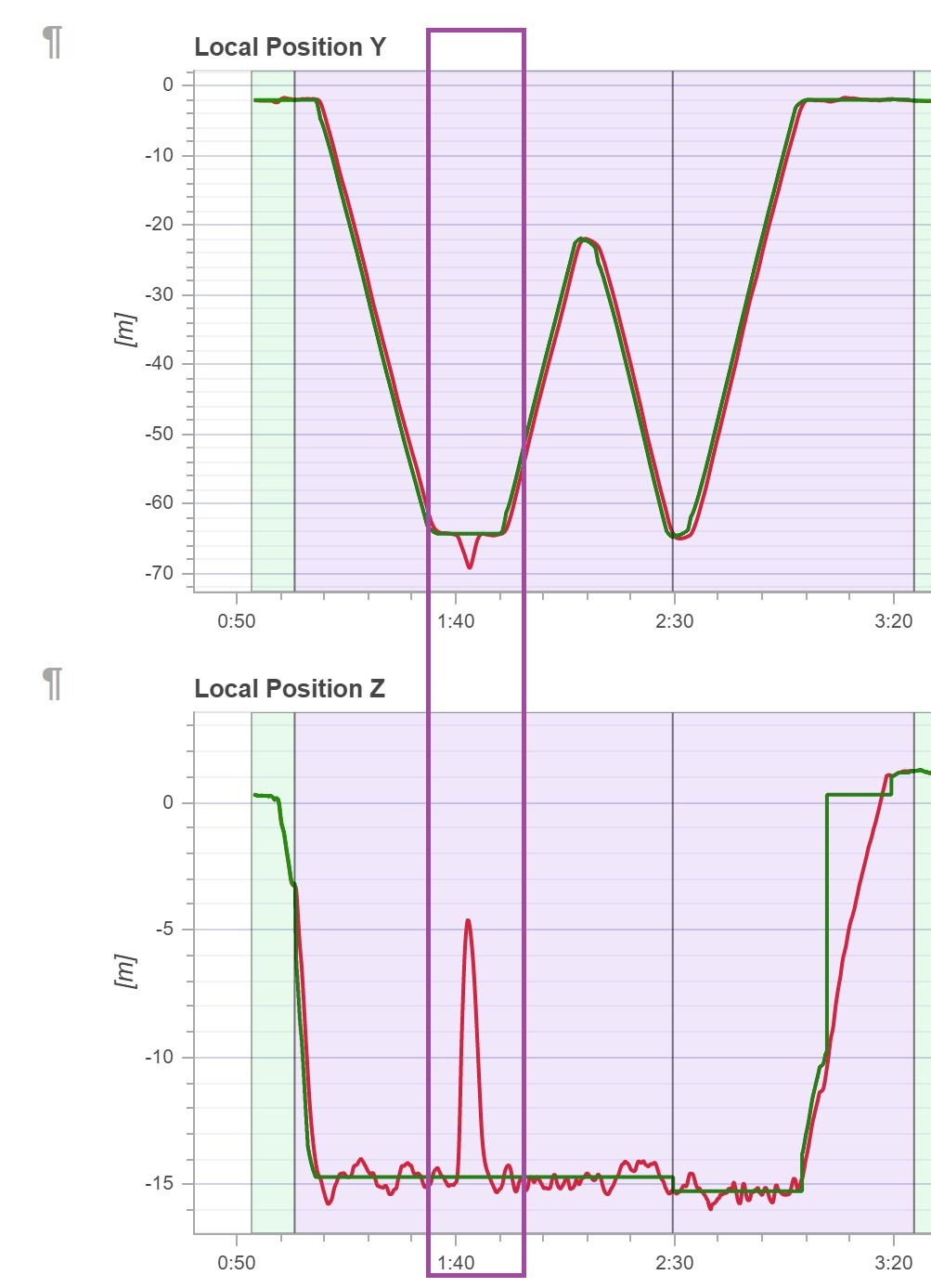
When doing my very first mission flight the quad took off, got to the mission start waypoint, went to the first waypoint with “hover 15 seconds in 15 m alt relative to start position” mission.
In this first hover phase approx in the middle of the wait time you can see a big spike on the z-axis. This is when the quad actually turned itself on its head and dropped like a stone. After a couple of meters the quad self stabilized a couple of meters from the ground (maybe 2 -5 meters) and continued the mission without any further issues (flying back up to 15m height, finishing the wait and turning to fly to 2nd waypoint).
The second flight directly succeeded the first flight, without any changes to the system or loading the battery.
Does a more advanced px4 user see any flaws or problems that could have caused this issue?
Thank you for any input.