Sorry to hear about your crash.
The drone went into a freefall when switching to manual because the throttle stick was at zero. At zero thrust and without airmode enabled, the drone cannot hold its attitude, this is why it flipped.
Remember to always keep the throttle stick centered when flying in auto mode to avoid this problem in case you need to switch to manual at some point.
I though that switching to manual with zero thrust was the main reason, but I still have some uncertainties:
0.2 [sec] after the switching I pushed the throttle stick up but it didn’t help to stable the drone, is this was too late? maybe entering to manual mode while still in RTL maneuver with zero thrust was too difficult to handle for the controller?
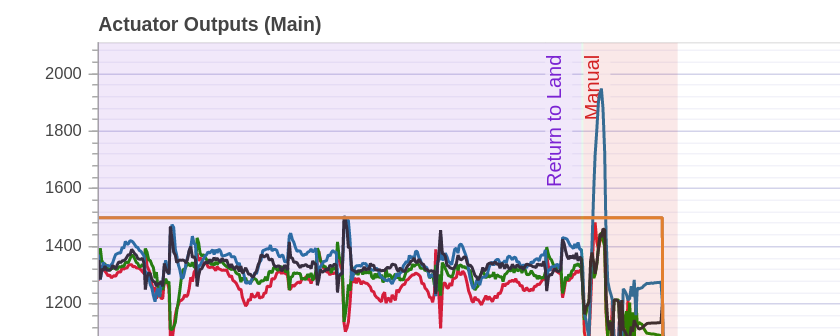
The output of motor number 3 after increasing the throttle was at pick of 1950 PWM, it doesn’t feel reasonable right?