I’m not sure if this is the right discussion but, I’ve been working on a project to have a Pixhawk 4 autopilot a mission. The plane has one motor and servo motors to control the yaw, pitch and roll. I’ve connected the motor to the power management board and it powers on just fine. I get stuck on how to get the Pixhawk to control the servos because I’ve attached them to the fmu-pwm-out pins on the power management board but I’m confused on what I should do after that. I’ve tried Googling to see if I could find a solution but I have not found one yet. I’ve also tried looking at the parameters but I don’t know what to change in there either. Is there something I should do in the Taranis X9D Plus to set the flight mode to control the servo?
Sorry it took me so long to respond.
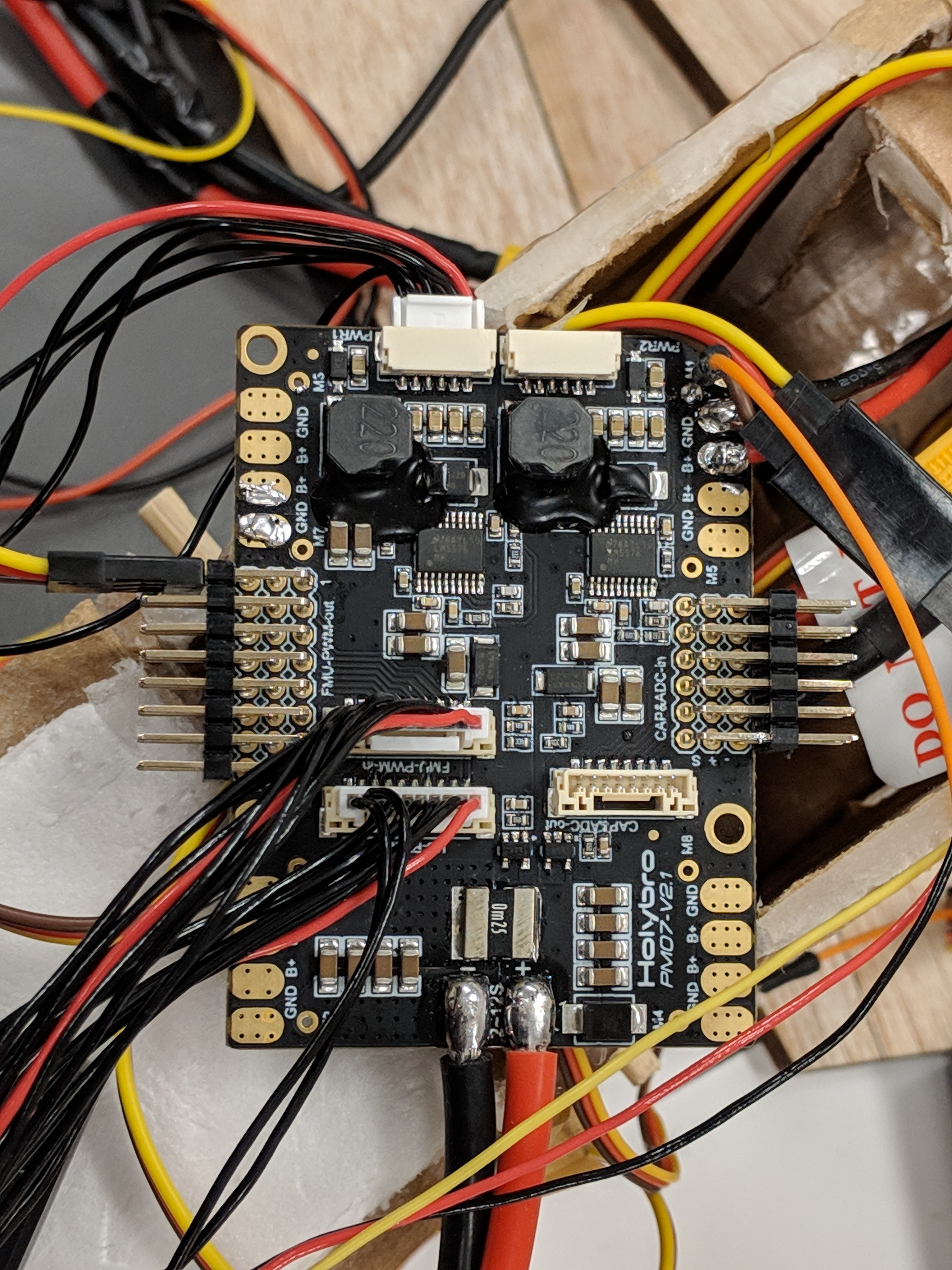
Hopefully this picture is fine but I can take more if that is necessary. Here is a picture of all the cables attached to our power management board. The first IO out pins in the top right of the power management board connect to an esc which connects to the motor. The FMU in and IO in bus on the board connect to the Pixhawk as well the the PWR bus. There is only one servo connected to the FMU out pin on the left of the board. In the picture, the FMU out pin is not powered but it is powered with 5 volts from the esc.
Does your ESC provide enough power to run a servo? Can you check using a very small servo if that works? Or do you have a scope to check if the signals are on?
Cool, thanks. After finding that and looking around, I figured out my problem. I did’t realize the I/O PWM Out cable had to be plugged into the FMU PWM port on the power management board.
I’m building an Hexacopter with Pixhawk4. I don’t want to solder the esc to the PDB. Can you share the
details of how to connect esc to the PDB and how to connect from PDB to Pixhawk 4.
I have soldered ESC +ve and -ve to the frame.
I have following question :
1.Can I use splitter provided in the package to connect ESC’s to it and connect it to I/O PWM IN?
2. How do I connect from Pixhawk 4? Can I connect I/O PWM OUT. to FMU PWM IN ?