We are trying to connect the TFmini-PLUS LiDAR to the PX4-frameware. We followed this documentation from Benewake to do this task:
However, we didn’t get the expected distance from the sensor in the QGroundControl program. Instead, the distance shown in the QGC was the distance measured by the pixhawk4’s sensor (which we intended to replace it with the TFmini LiDAR).
It must be mentioned that we done this using the UART port not the Telem2 port suggested by the documentation. Can anyone give me the potential reasons for that? or suggest any modification that can help in using this LiDAR with the PX4?
These are the parameters that relate this sensor and its settings:
SENS_TFMINI_CFG : UART
EKF2_RNG_AID : enabled
EKF2_RNG_A_VMAX : default
EKF2_RNG_A_HMAX : default
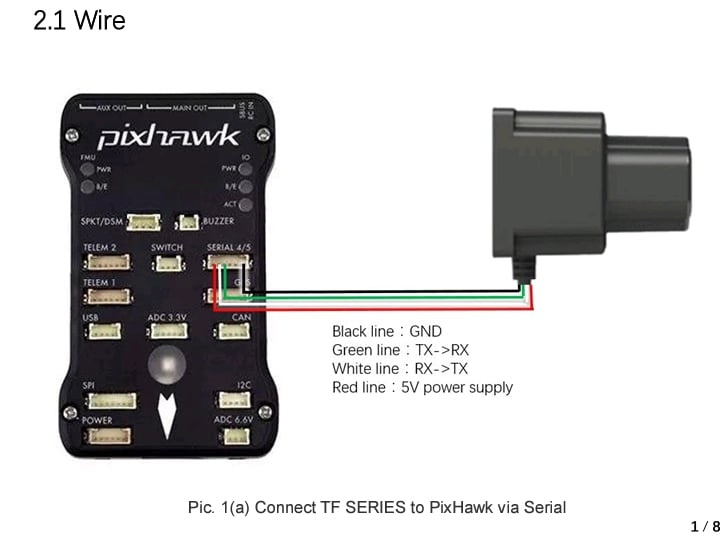
And this is the wire connection: