Benewake TF03 LiDAR can directly be connected with the serial port of Pixhawk. TF03 can be used in flight device for the purpose of altitude holding or obstacle avoidance. This document is suitable to Pixhawk adopts ArduCopter V3.6.2 or higher firmware(Note:Standard output mode should be used instead of PIX mode by Benewake GUI in firmware V3.6.2 or above).
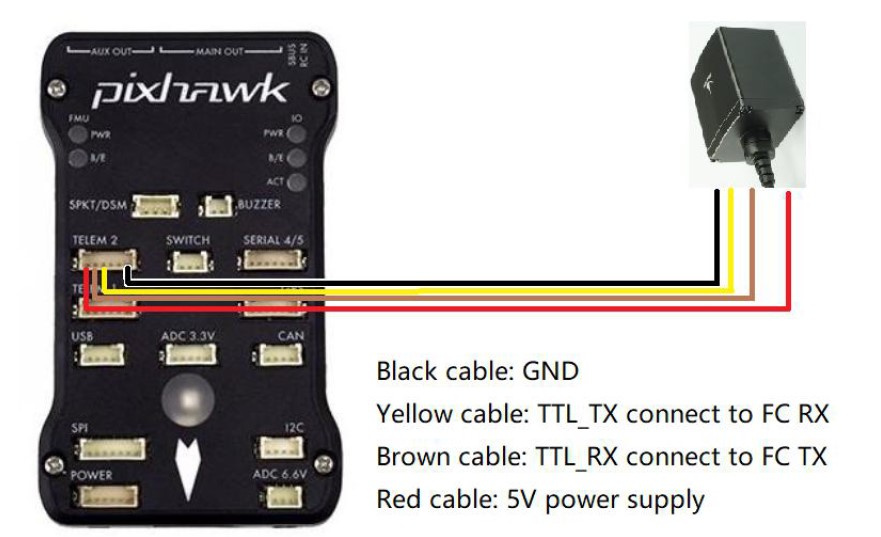
Figure 1 Schematic Diagram of Connecting TF03 with TELEM 2 Interface (Serial Port 2) of Pixhawk
Example for connecting Pixhawk:
For more information:http://en.benewake.com/
a) Mission Planner configuration description of TF03 for the purpose of altitude hold
Connect the flight control board to MP.Attention:the installation height should be bigger than non-detection zone.Select [Full Parameter List] in the left from the below bar- [CONFIG/TUNING] . Find and modify the following parameters:
SERIAL2_PROTOCOL = 9 [Rangefinder option]
SERIAL2_BAUD = 115 [Choose the current LiDAR baud rate,if haven’t been changed,the default baud rate 115200 should be selected,that is 115]
RNGFND_TYPE = 19 [Same option with TF02]
RNGFND_MIN_CM = 20 [It could be changed according to real demands and should be bigger LiDAR than non-detection zone,unit is cm]
RNGFND_MAX_CM = 5000 [It could be changed according to real demands but should be smaller than effective measure range of LiDAR,unit is cm]
RNGFND_GNDCLEAR = 20 [expressed in cm, depending upon mounting height of the module and should be bigger LiDAR than non-detection zone]
RNGFND_ORIENT=25 [face down]
PRX_TYPE=0
Upon setting of these parameters, click [Write Params] on the right of the software to finish.
If the error message “ Bad Lidar Health ” appears, please check if the connection is correct and the power supply is normal.
How to see the altitude value from LiDAR sensor:double click the area of the Mission Planner,see the following picture:
Select option sonarrange ,see following picture:
The altitude distance from the Benewake LiDAR will be displayed in Sonar Range(meters),see the following picture:
b)Mission Planner configuration description of TF03 for the purpose of Obstacle Avoidance
It’s only recommended to be used in Loiter mode,the detail setting is as followings:
Connect the flight control board to MP.Attention:distance between UAV margin and LiDAR should be bigger than LiDAR non-detection zone.Select [Full Parameter List] in the left from the below bar- [CONFIG/TUNING] . Find and modify the following parameters:
AVOID_MARGIN=5 [Unit: m, set obstacle avoidance distance as required]
SERIAL2_PROTOCOL = 9 [Rangefinder option]
SERIAL2_BAUD = 115 [Choose the current LiDAR baud rate,if haven’t been changed,the default baud rate 115200 should be selected,that is 115]
RNGFND_TYPE = 19 [Same option with TF02]
RNGFND_MIN_CM = 20 [It could be changed according to real demands and should be bigger LiDAR than non-detection zone,unit is cm]
RNGFND_MAX_CM = 5000 [It could be changed according to real demands but should be smaller than effective measure range of LiDAR,unit is cm]
RNGFND_GNDCLEAR = 20 [Unit: cm, depending upon mounting height of the module and should be bigger LiDAR than non-detection zone]
RNGFND_ORIENT=0 [It depends on the LiDAR’s real installation direction,0~7 is supported up to now,see detail in MP]
PRX_TYPE=4 [RangeFinder should be selected for proximity sensor in obstacle avoidance mode]
Upon setting of these parameters, click [Write Params] on the right of the software to finish.
If the error message “ Bad Lidar Health ” appears, please check if the connection is correct and the power supply is normal.
How to see the target distance from the LiDAR:(distance from LiDAR in obstacle avoidance can’t be displayed in sonarrange option )press Ctrl+F button in keyboard,the following window will pop out:
Attach:If TELEM 2 port has been used ,SERIAL4/5 interface could be used,the other setting are same
Click button Proximi ty,the following window will appear:
The number in green color means the distance from LiDAR in obstcle avoidance mode(the number only refresh when this window open,close,zoom in or zoom out,it doesn’t mean the real time distance from LiDAR and will not be influenced in Mission Planner version under v1.3.48,the problem could be solved by updating Mission Planner)
Figure 2 Schematic Diagram of Connecting TF03 with SERIAL4/5 Interface (Serial Port 4/5) of Pixhawk
Configuration Descriptions of Mission Planner
Connect flight control board to MP, Select [Full Parameter List] in the left from the below bar [CONFIG/TUNING] . Find and modify following parameters:
SERIAL4_PROTOCOL = 9
SERIAL4_BAUD = 115
Upon setting of these parameters, the other parameters should be same as Mission Planner configuration description of TF03 for the purpose of Obstacle Avoidance or Altitude Holding,then click [Write Params] on the right of the software to finish.
Need help? Please feel free to email: bw@benewake.com