Hi gentleman, i would like know if it is possible command (on-off) an external buzzer (i.e. Viìfly 2) via servo port (i.e n°5) as a landing gear (up and down) for a fixed wing?
What’s the interface to the external buzzer? PWM or the frequency to make it buzz?
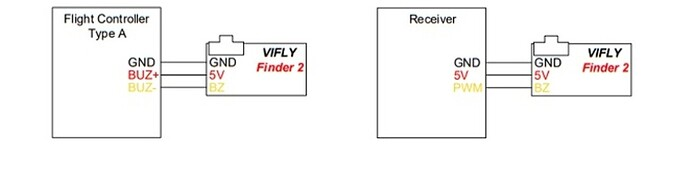
Dear Julian , it can be connected as pwm . Take a look at the picture.
In that case it should be possible. I’m not sure if I would use the landing gear functionality or just use Aux 1 or Aux 2, they are usually forwarded in the mixer for such things.
Which model are you using? What is your param SYS_AUTOSTART?
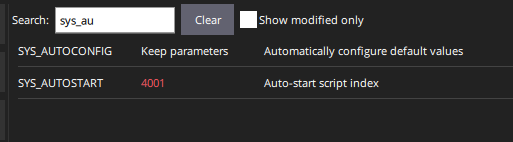
Hi Julian, model is a quadcopter setted as dji fw450. the sys_autostart parameter is 4001
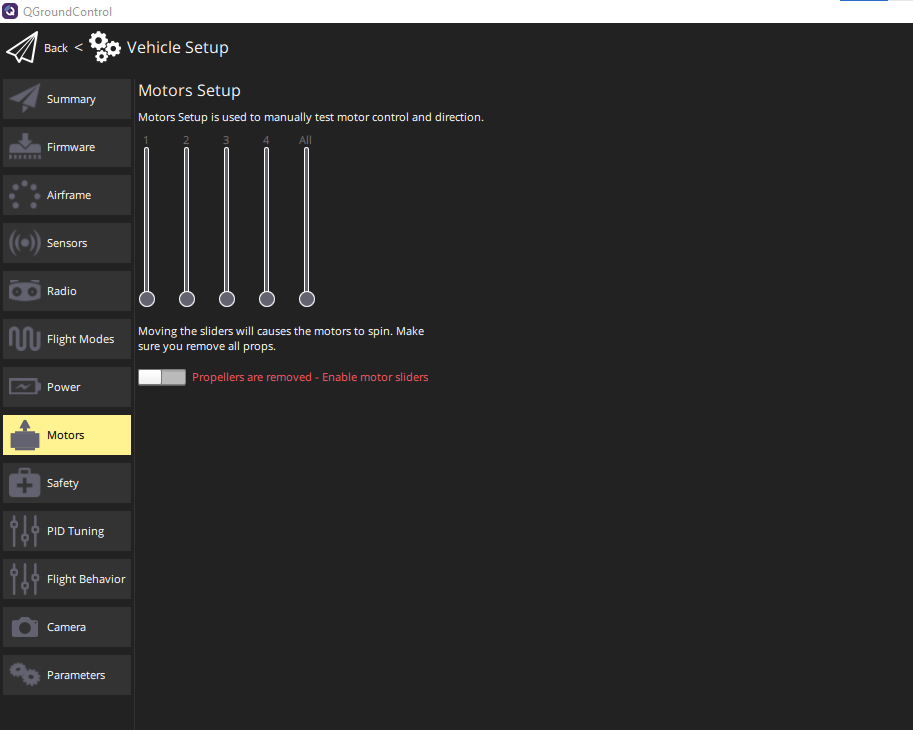
Can you configure Aux 1/2 in the actuators tab in QGC?
@bkueng any tips how to use Aux with 4001 on v1.13?
The quad_x mixer sets AUX1 Passthrough on output 5. So you can assign an RC switch to AUX1 to test and use it.
@JulianOes and @bkueng , many thaks for the effort.
So i have to act, in my case via “Radio (Remote Control) Setup” tab. I will try and i will share the results.
But now a new question is: if i update my quad firmware at last stable release (v1.13.3) , in QGC, the actuators tab will be implemented?
Not yet on 1.13, but you’re welcome to test 1.14, which is in the process of being released, and has the actuators by default.