UAVros contains multiple ROS packages for PX4-gazebo simulation and experiment for UAV-UGV swarm:
| ROS Module | PX4 version | Function |
|---|---|---|
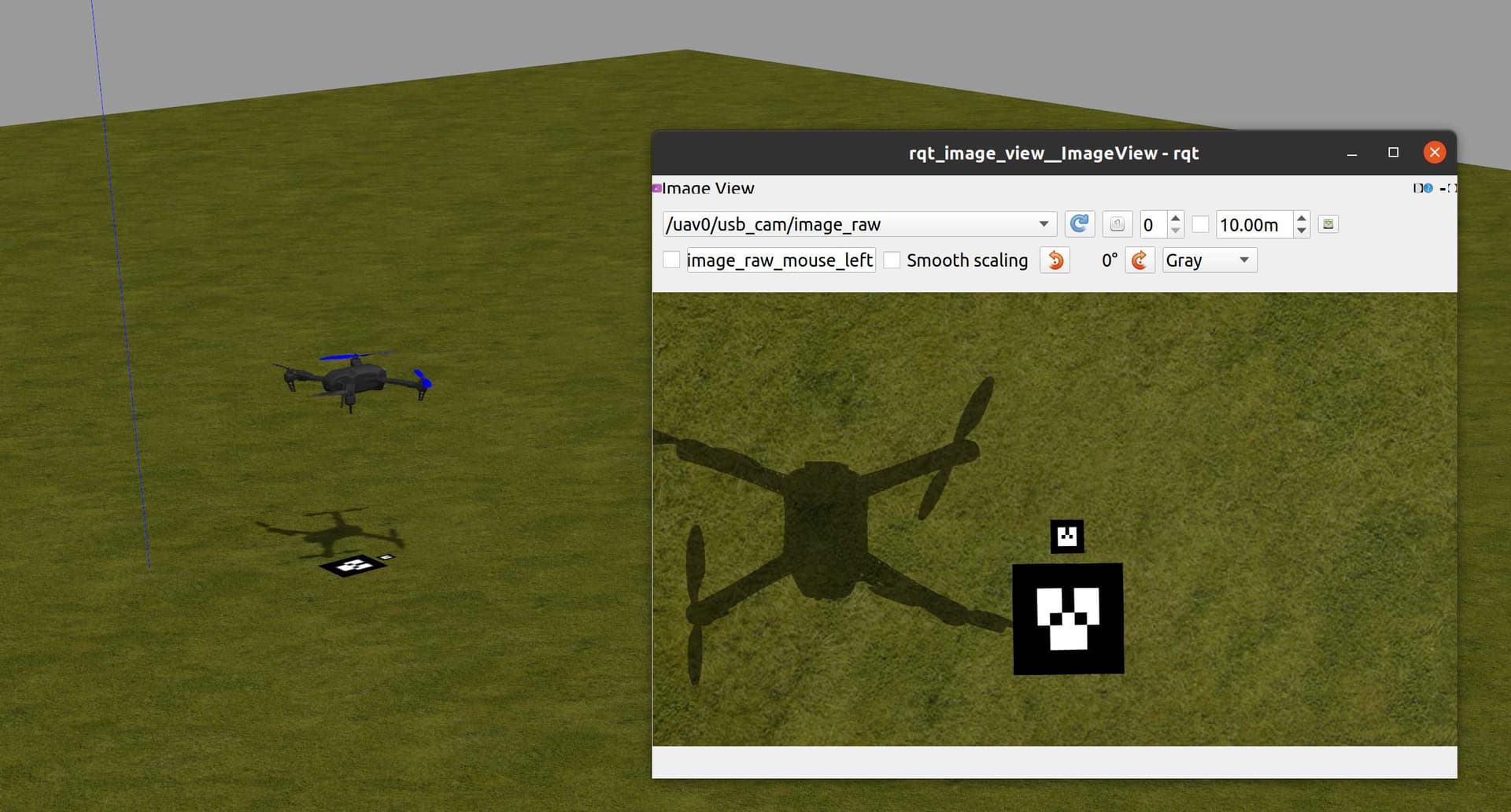
| ARtagLanding_sitl | v1.11.3, v1.12.0-beta3, v1.13.3 | Single UAV lands on an AR tag based on the visual servo using downward camera |
| kcffollow_simulation | v1.11.3, v1.12.0-beta3, v1.13.3 | Single UAV tracks AR tag using downward camera and KCF tracking algorithm |
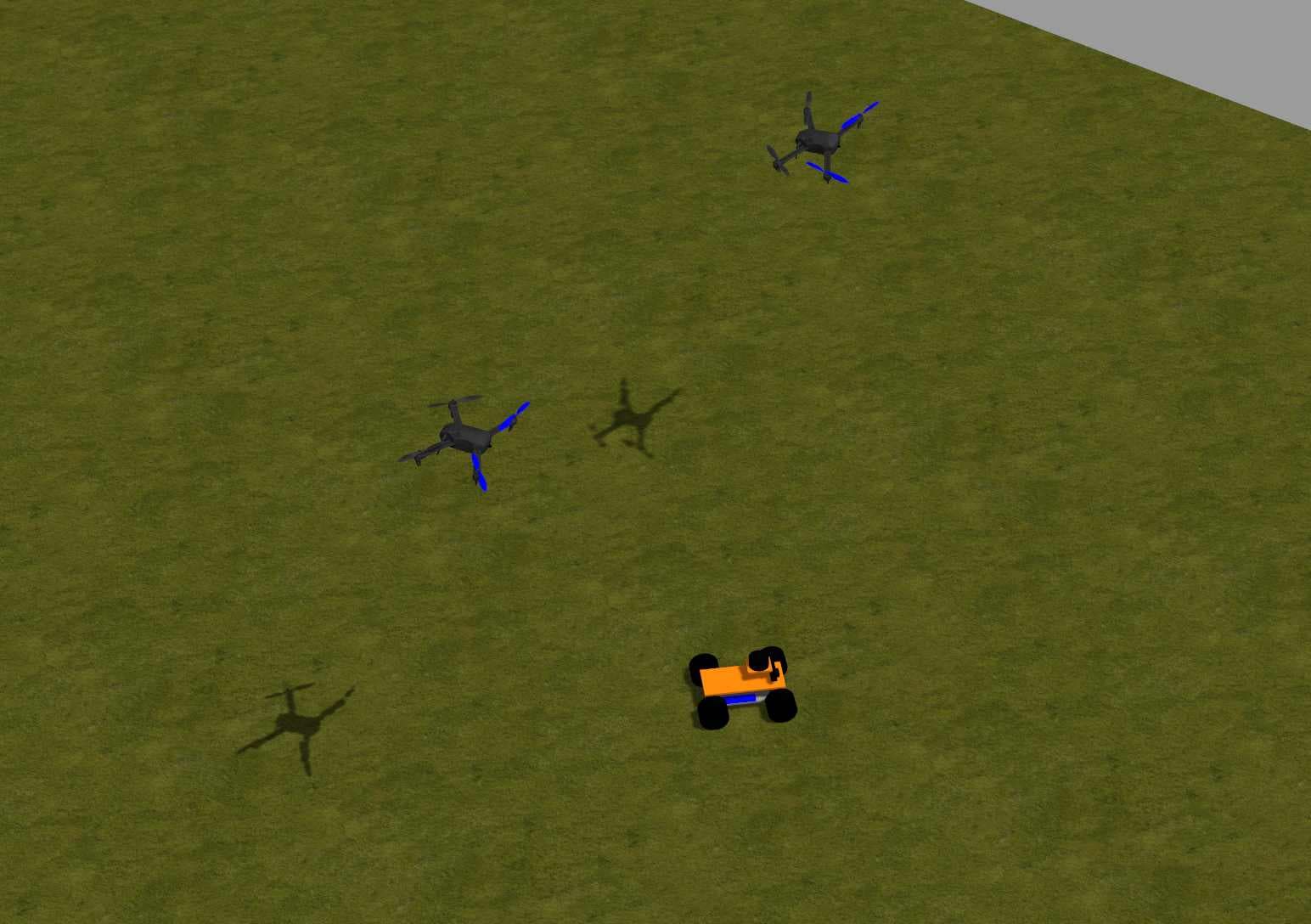
| uavros_uavugv_sitl | v1.11.3, v1.12.0-beta3, v1.13.3 | Two UAVs fly around the UGV in a spinning circle formation |
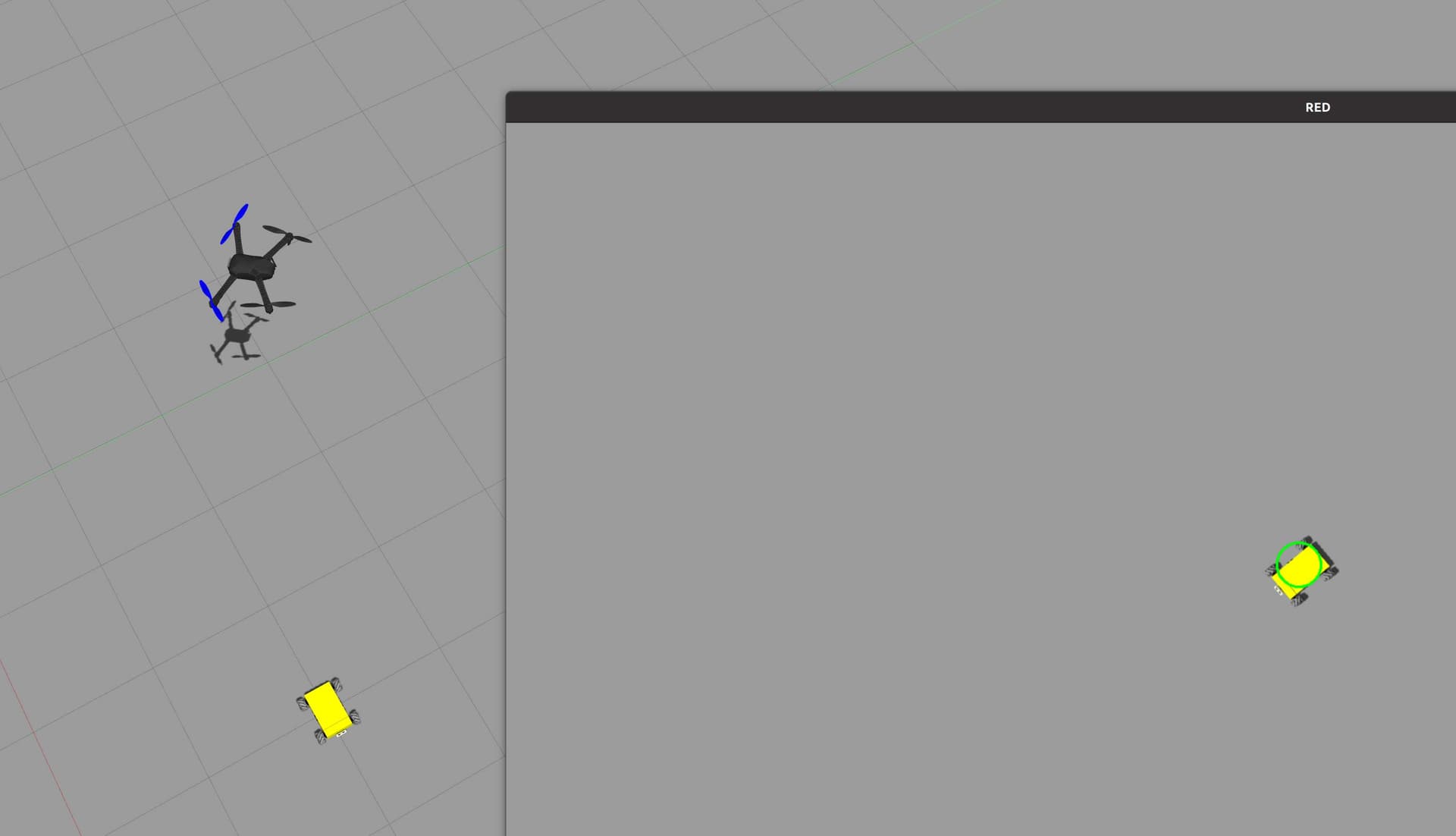
| uavros_wrzf_sitl) | v1.11.3, v1.12.0-beta3, v1.13.3 | Single UAV tracks the preset GPS setpoints and moving UGV based on the color detection using downward camera |
| uavros_multi_gimbal_sitl | v1.13.3, v1.14 | Multi-UAV with gimbal cameras cooperatively search and track targets |
| uavros_gazebo | > v1.11.3 | Gazebo simulation modules |