Hi again,
I’m currently trying to have multi-vehicle setup to have 2 drones in my Gazebo world. One is Typhoon H480 and the other is Iris. What I am trying to achieve is, run mavros_offboard_posctl_test.py among the following examples:
And I followed the tutorial below:
https://docs.px4.io/master/en/simulation/multi_vehicle_simulation_gazebo.html
I have achieved to programmatically control H480 by using that rospy code. Now I need to use another mavros node so that I can capture image of the Iris. However, I seem to fail. Here is my edited launch file:
<?xml version="1.0"?>
<launch>
<!-- MAVROS posix SITL environment launch script -->
<!-- launches Gazebo environment and 2x: MAVROS, PX4 SITL, and spawns vehicle -->
<!-- vehicle model and world -->
<arg name="est" default="ekf2"/>
<arg name="vehicle" default="iris"/>
<arg name="world" default="$(find mavlink_sitl_gazebo)/worlds/empty.world"/>
<!-- gazebo configs -->
<arg name="gui" default="true"/>
<arg name="debug" default="false"/>
<arg name="verbose" default="false"/>
<arg name="paused" default="false"/>
<!-- Gazebo sim -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="gui" value="$(arg gui)"/>
<arg name="world_name" value="$(arg world)"/>
<arg name="debug" value="$(arg debug)"/>
<arg name="verbose" value="$(arg verbose)"/>
<arg name="paused" value="$(arg paused)"/>
</include>
<!-- UAV0 -->
<group ns="uav0">
<!-- MAVROS and vehicle configs -->
<arg name="ID" value="0"/>
<arg name="fcu_url" default="udp://:14540@localhost:14580"/>
<!-- PX4 Typhoon H480 and vehicle spawn -->
<include file="$(find px4)/launch/single_vehicle_spawn.launch">
<arg name="x" value="0"/>
<arg name="y" value="0"/>
<arg name="z" value="0"/>
<arg name="R" value="0"/>
<arg name="P" value="0"/>
<arg name="Y" value="0"/>
<arg name="vehicle" value="typhoon_h480"/>
<arg name="mavlink_udp_port" value="14560"/>
<arg name="mavlink_tcp_port" value="4560"/>
<arg name="ID" value="$(arg ID)"/>
<arg name="gst_udp_port" value="$(eval 5600 + arg('ID'))"/>
<arg name="video_uri" value="$(eval 5600 + arg('ID'))"/>
<arg name="mavlink_cam_udp_port" value="$(eval 14530 + arg('ID'))"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="gcs_url" value=""/>
<arg name="tgt_system" value="$(eval 1 + arg('ID'))"/>
<arg name="tgt_component" value="1"/>
</include>
</group>
<!-- UAV1 -->
<group ns="uav1">
<!-- MAVROS and vehicle configs -->
<arg name="ID" value="1"/>
<arg name="fcu_url" default="udp://:14541@localhost:14581"/>
<!-- PX4 SITL and vehicle spawn -->
<include file="$(find px4)/launch/single_vehicle_spawn.launch">
<arg name="x" value="1"/>
<arg name="y" value="0"/>
<arg name="z" value="0"/>
<arg name="R" value="0"/>
<arg name="P" value="0"/>
<arg name="Y" value="0"/>
<arg name="vehicle" value="$(arg vehicle)"/>
<arg name="mavlink_udp_port" value="14561"/>
<arg name="mavlink_tcp_port" value="4561"/>
<arg name="ID" value="$(arg ID)"/>
<arg name="gst_udp_port" value="$(eval 5600 + arg('ID'))"/>
<arg name="video_uri" value="$(eval 5600 + arg('ID'))"/>
<arg name="mavlink_cam_udp_port" value="$(eval 14530 + arg('ID'))"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="gcs_url" value=""/>
<arg name="tgt_system" value="$(eval 1 + arg('ID'))"/>
<arg name="tgt_component" value="1"/>
</include>
</group>
</launch>
<!-- to add more UAVs (up to 10):
Increase the id
Change the name space
Set the FCU to default="udp://:14540+id@localhost:14550+id"
Set the malink_udp_port to 14560+id) -->
I run the mission using the following:
git submodule update --init --recursive
DONT_RUN=1 make px4_sitl_default gazebo
source Tools/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd):$(pwd)/Tools/sitl_gazebo
roslaunch px4 multi_uav_mavros_sitl.launch
And then I do:
- On another terminal, run
roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557" - On third terminal, run
python2 sim/taha/multi_rospy_8/mavros_offboard_posctl_test.py
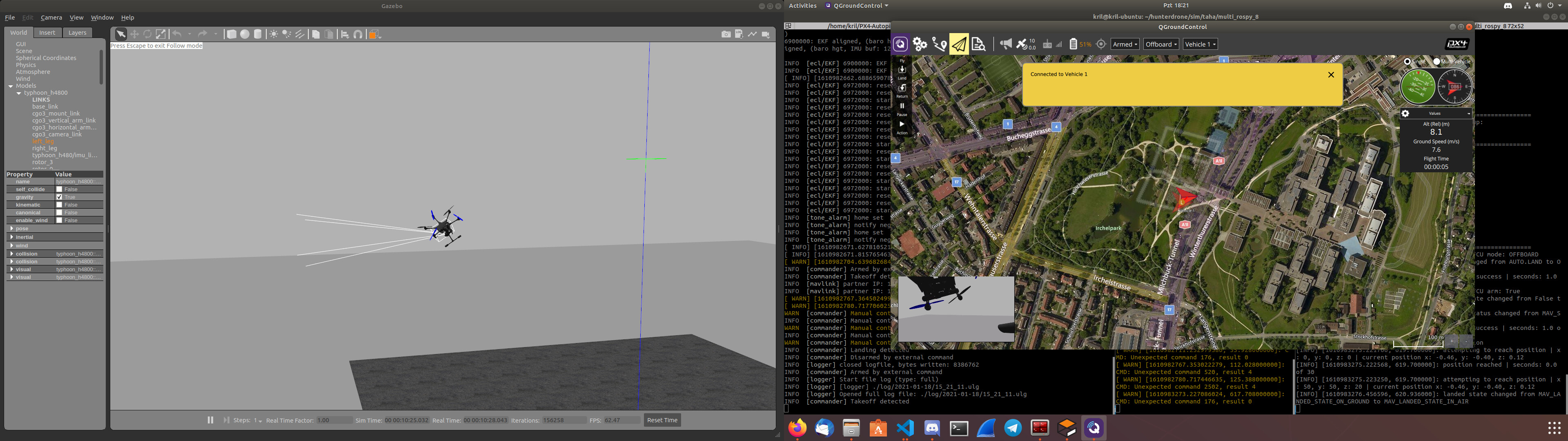
I can fly H480 as seen:
Without further due, I’m looking for any assist, especially regarding this following statement on the ROS-Gazebo multi-vehicle part on the PX4 guide: