Hi guys, just transitioned from Ardupilot and having some issues mixing servo outputs.
I have a custom airframe and am looking to couple both yaw and pitch on two of the servos. It is setup as below:
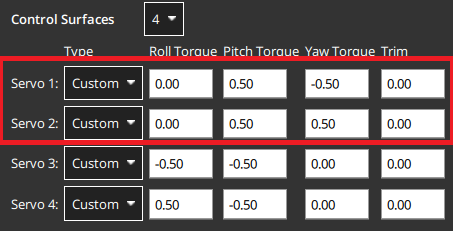
When probing the PWM output of the pins, the signal does not change when changing the yaw input in on the controller. Is there a way to fix this issue?