Hi ! I have an issue with the control of my servomotors.
So this is my mixer :
Small foil mixer
Two scalers total (output, roll).
The mixer is configure as a pass through.
M: 1
O: 10000 10000 0 -10000 10000
S: 0 0 10000 10000 0 -10000 10000
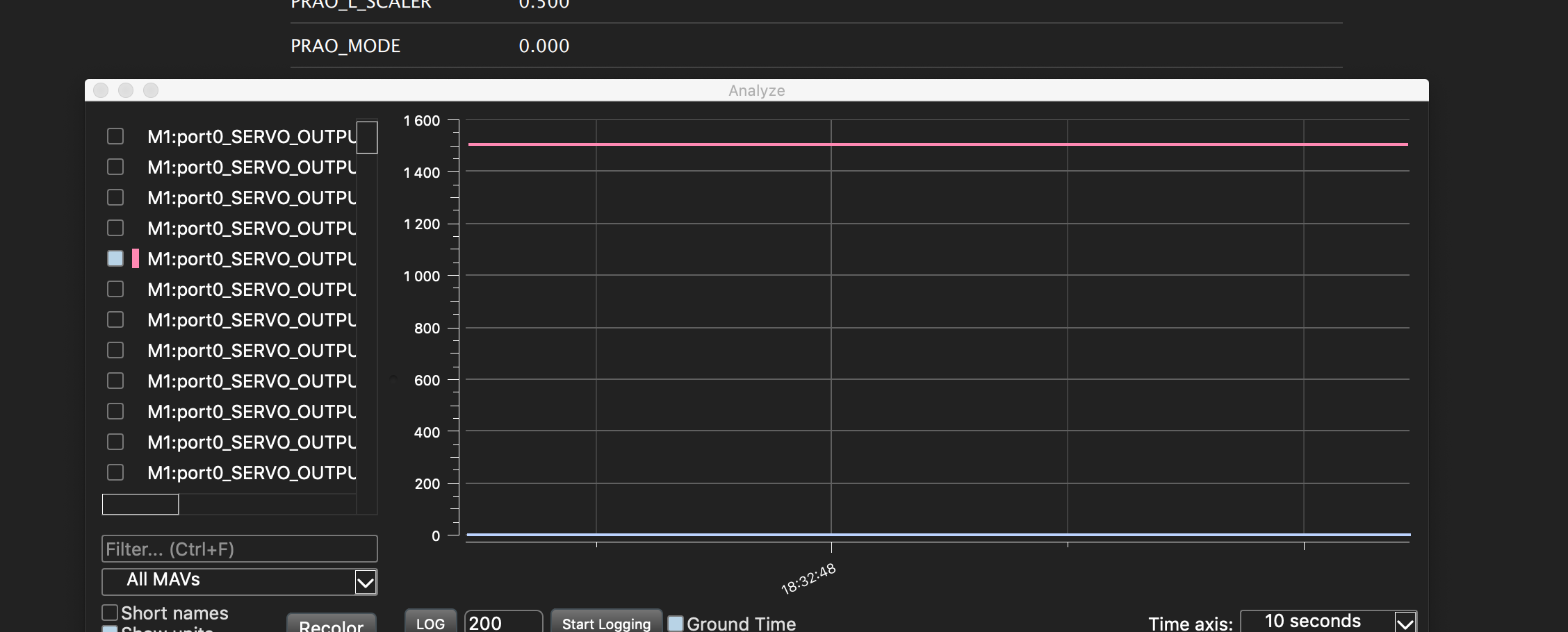
I think I understood how mixers work and I sticked to a regular one but I logged the data and as you can see above, when my variable ACTUATOR_CONTROL_TARGET is 0, the variable that is sent to the servo, port0_SERVO_OUTPUT has a weird offset of 1500, and varies between 1000 and 2000 when ACTUATOR_CONTROL_TARGET varies between its extreme values. I don’t understand the relation of this with the mixer I used. Could someone help ? Thanks