I’m testing Quad rotor VTOL in configuration like this:
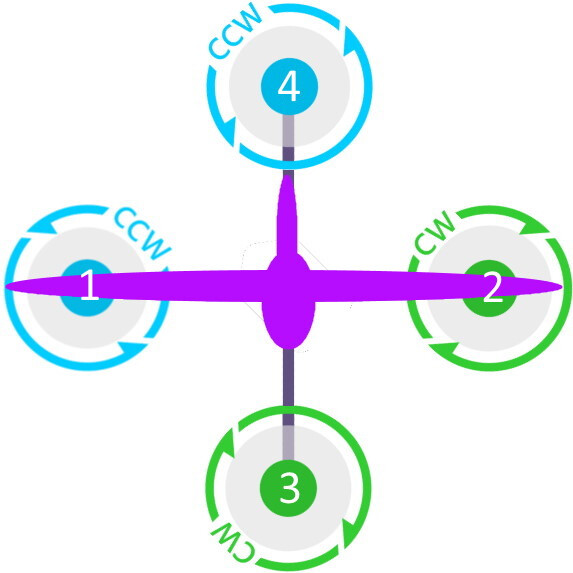
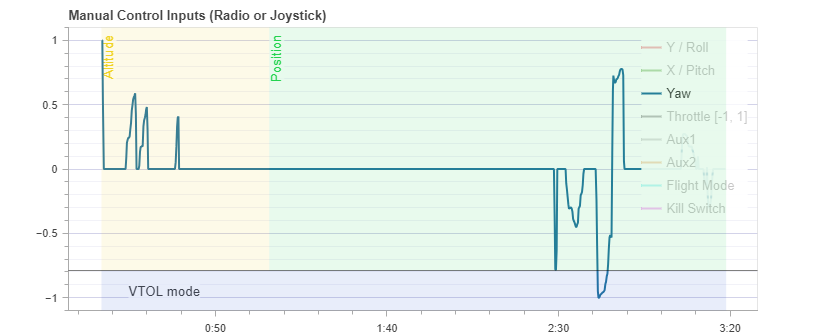
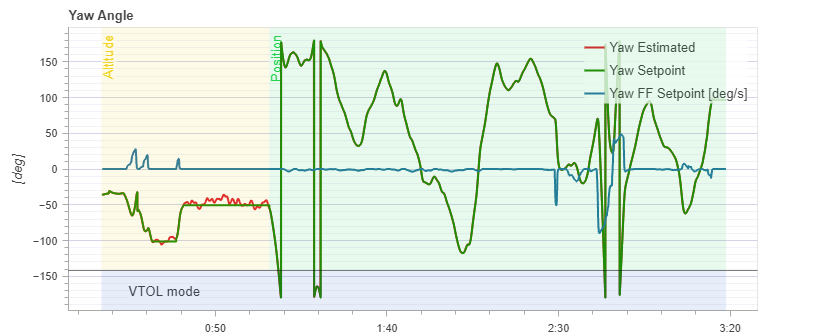
I disabled the YAW rate control (due to motor CW and CCW setup) by setting YAWRATE PID to 0. I enabled the Elevons in QUAD mode. In altitude flight mode the YAW rate is working properly and uses elevons to control YAW angle but when switching to position flight mode the YAW rate do not work almost at all. The drone was spinning around with no manual input. When I started acting on YAW Axis the reaction was proper but still when center the sticks YAW dance begins.
What could be the cause of this type of behavior? Is there any better way to set up YAW control in this type of aircraft?
Here are some plots from log files:

Thanks for any help and suggestions
Best Regards