I’m trying to mix control for this air frame : https://www.youtube.com/watch?v=8VPS4DjgtXg
on the video Yaw and pitch are controled as evry multicopters
it has 2 servos for pitching rotors front or back and I try to mix to get :
-
yaw control by differential rotor tilt between right and left
-
Speed X control by tilting more or less frontward both side same amount (while keeping pitch set point to 0)
I’m just making test on bench for now
here’s my test mixMotors
R: 4x 10000 10000 10000 0
#Tilt Servos
M:2
O: 10000 10000 0 -10000 10000
S: 0 1 6000 6000 0 -10000 10000
S: 0 2 6000 6000 0 -10000 10000
M:2
O: 10000 10000 0 -10000 10000
S: 0 1 6000 6000 0 -10000 10000
S: 0 2 -6000 -6000 0 -10000 10000
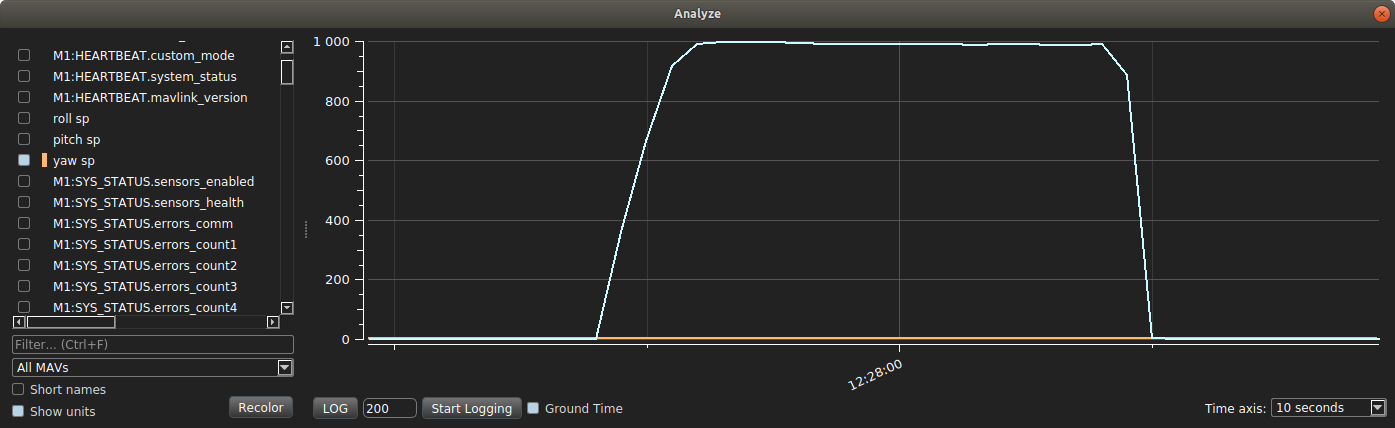
I’m working in manual mode and I dont understand why when acting on yaw stickM1.MANUAL_CONTROL.rmoves whileyaw spdon’t
as you can see
MAV_TYPE is 21 (tilt rotor VTOL) but for now I’m just testing in MC mode
I’ve test using roll instead of yaw control input and it mix well :
# Motors
R: 4x 10000 10000 10000 0
#Tilt Servos
M:2
O: 10000 10000 0 -10000 10000
S: 0 1 6000 6000 0 -10000 10000
S: 0 0 6000 6000 0 -10000 10000
M:2
O: 10000 10000 0 -10000 10000
S: 0 1 6000 6000 0 -10000 10000
S: 0 0 -6000 -6000 0 -10000 10000
I missed something …
edit :
I tested also with Virtual MC control group and it give nothing on yaw and pitch …