I don’t have experience with EDF. All my projects before this one were with propellers. I didn’t know about that “anti-torque” detail. I haven’t modified it.
maybe I have to manufacture another metallic part to replace this one with “anti-torque” or think of some device to control the air flow.
thanks for the info, would hardly find about this effect in these EDFs so fast.
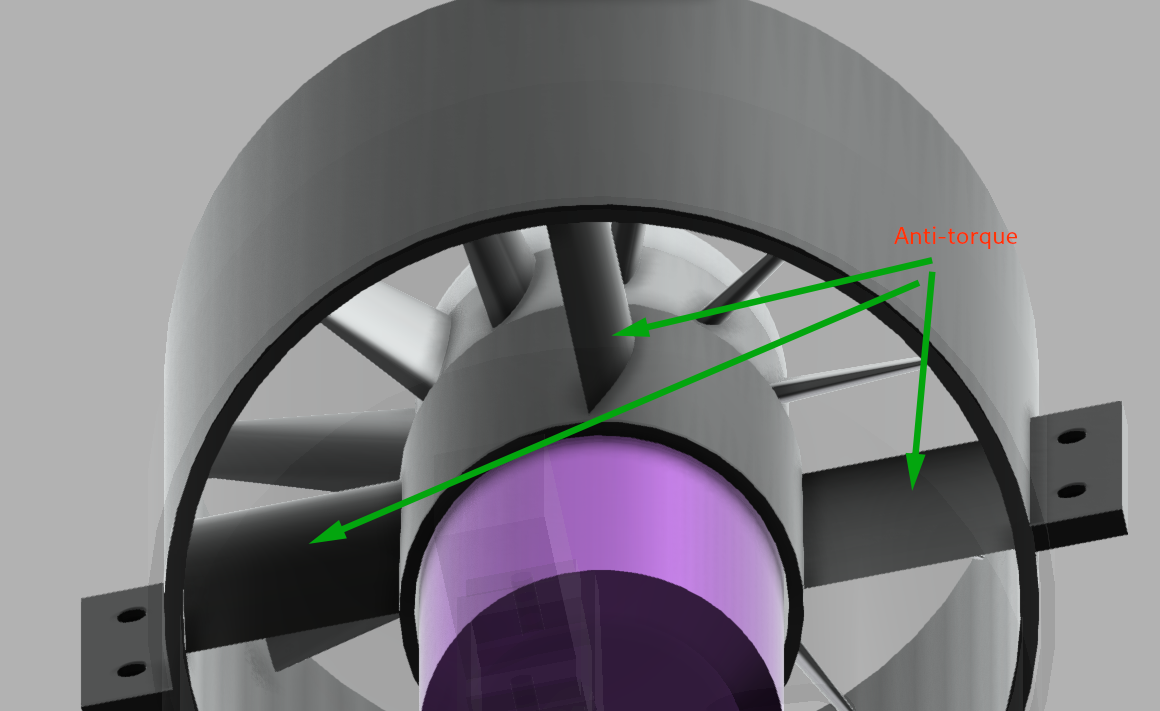
Yes, you’ll see that an EDF is designed to produce no torque at its nominal RPM.
However, the good news is that you don’t need that torque to produce yaw control, you can also slightly tilt (3-5 degrees should be enough) the EDFs to produce this yaw torque. For example,on a quad x multirotor, the front right motor is turning CCW, so it’s supposed to produce a CW torque. Now If you tilt it to the rear-right, its thrust will produce a CW torque.
So just tilt them and you won’t need to modify the stator of the EDFs
Hi,
It’s a good idea, I’ll do it and test.
I’m a little worried about the weight of the drone and how much torque I’m going to get, these motors apparently seem small.
I changed this setup from Quad to Hexa (+) due to the low thrust for the weight of drone, now the thrust is ok, this yaw control issue remains to be resolved.
My setup:
EDFs: EDF Ducted Fan JP Hobby 120mm + motor 18s 510Kv
Aircraft weight: ~20Kg/44lbs.