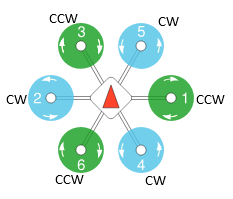
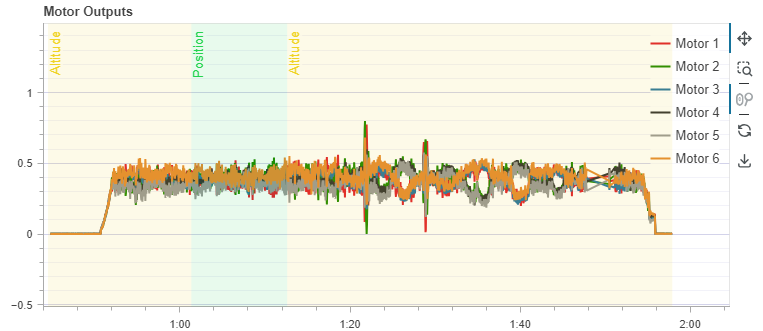
Hi, I build a hexacopter on CubeOrange, with T-Motors MN601-S and 20-inch propellers. During the flight, I noticed that CCW motors are sometimes spinning on the minimum. As I reviewed the log, CW motors are working on around 60%, while CCWs are chilling on about 20%. What can be the cause of such behavior?
I checked for mechanical imbalance, but everything seems to be fine.
I haven’t finished PID tuning yet, because I want to fix this issue first. Currently drone is flying pretty ok, except for very slow YAW turning (probably because of imbalance).
Hi,
I am also facing a similar situation with CUBE ORANGE on my Quadcopter running px4 v1.13.3.
Are your props of the same brand.
What is your PX4 version.
Hi
I have a vice versa situation. My CCW motors are running @ higher rpm than my CW motors.
I might think here it may be a CG issue. Are your T motors brand new.
Also while you place a sudden thrust on your quadcopter, does your frame yaw a bit right
Motors are brand new, that was the first couple of flights.
I carefully examine CoG and I thing it should be ok. Frame isn’t standard shape and autopilot is offset from the center, but I include this in parameters for sensors placement.
Also, I think that if CoG would be the problem, one side of the drone will be working harder than other, not every second motor
Also while you place a sudden thrust on your quadcopter, does your frame yaw a bit right
I am not sure, cause I was careful with throttle during this flights, but it is possible. Also sometimes it was changing altitude by its own in Altitude mode, when I think CCW motors where suddenly kicking in.
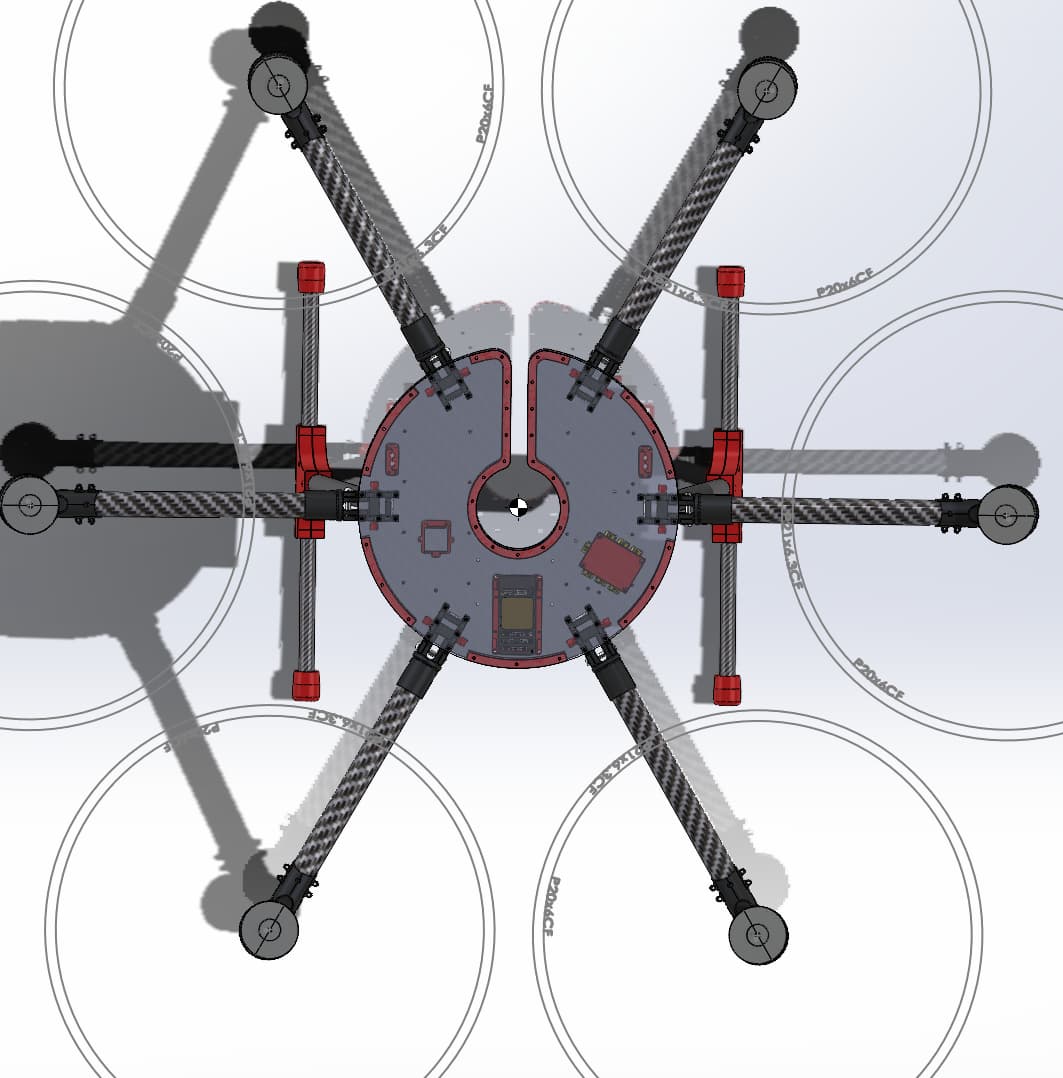
Are your carbon tubes square or round? If your tubes are round, how do you control rotation of the motors around the carbon tubes?
This behavior could be observed in situation when one or more of the motors have a tilt around the mounting CF tube, resulting in a yaw rotating force. This force needs to be compensated by differential thrust on CW/CCW motors.
Think the other way round, aerodynamically:
If the motor axes were all parallel,
CW motors working 60% and CCW 20%
should make the whole craft spin CCW like crazy.
So you must have mounted the majority of the motors in a corkscrew fashion.
Center of Gravity has nothing to do with it. Nor has any software or firmware version.
If I were you, I would unscrew the propellers, measure the shaft diameter, get myself tubes with that inner diameter (one per motor, ~ 1m / 40in long) and stick them on the shafts.
The misalignment of the motors should then immediately become apparent.
I am using round tubes. During the assembly I made special alignment jig to ensure there are no tilt around the tube. But surely I will check it again.
It is an option, but with this size of drone (1200mm frame and 20 inch props) I would like to avoid it.
Yes, this is only logical cause I can think of.
Great idea! I will use that method and let you know what I discovered. Thanks!
Trying to make them all flat/not canted I’ve seen lead to this more often than not. Adding intentional cant to them in opposite directions improves yaw performance and helps avoid them fighting each other.