hi there,
I have multiple holybro x500 v2 and they are flying nice with default params.
Lately, I had a test with one of them, When I give pitch or roll setpoint, it started to oscillate 3 or 4 times before leveling itself, though it was not behaving like this before. There are some tiny changes but not considerable between two configurations.
What might be the reason for this issue ?
I am adding both of the logs.
Writing this, maybe someone also has similar issue.
Problem was the speed limit, when I changed the speed limit from 6 km/h to 11 km/h, problem solved, though I don’t know why the limit causes this. If someone knows that would help
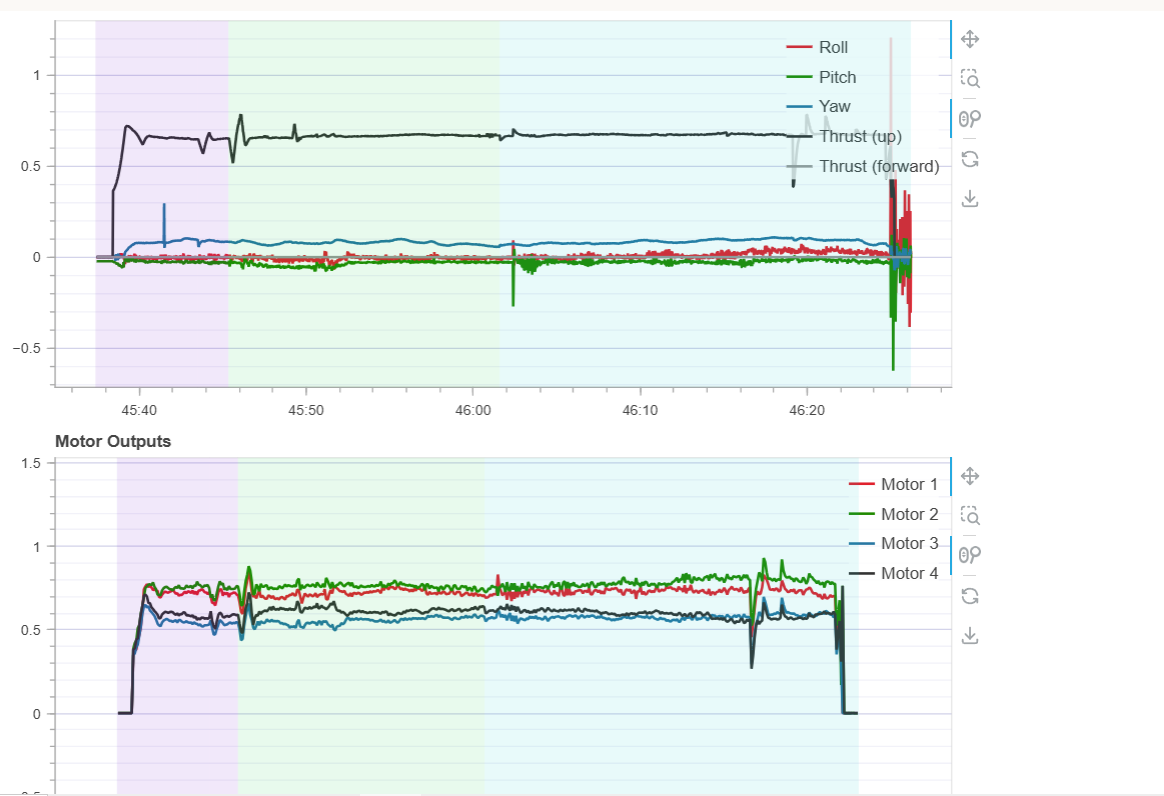
I think , the motor output graph from one of your plots also shows that there is a balance issue on the Quadcopter. All four motors ideally should be very close to each other