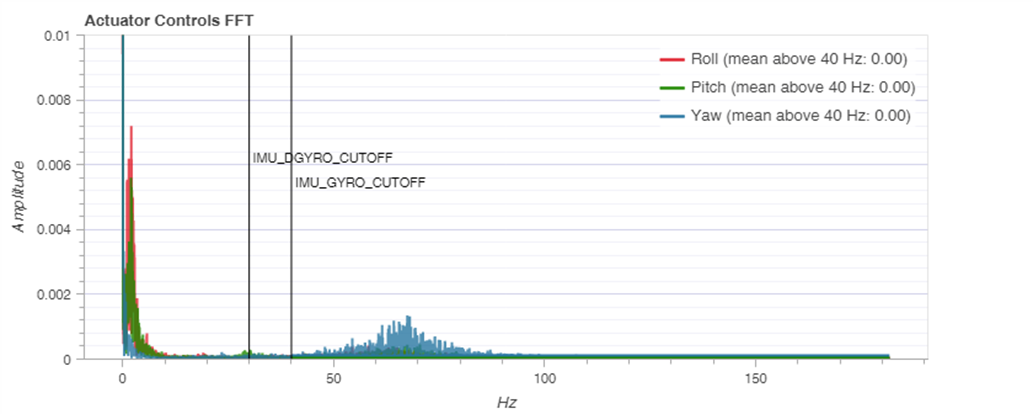
Hi, have you tried playing around with the cutoff frequency “example: IMU_DGYRO_CUTOFF = 20, IMU_GYRO_CUTOFF = 30” or reducing the D gain of Multicopter mode or setting it to zero “MC_PITCHRATE_D, MC_ROLLRATE_D, MC_YAWRATE_D”?
I recommended you enable the flight log with a high rate (SDLOG_PROFILE) in order to plot the FFT graph, it may help you to analyze deeper.
If the problem happens only in multicopter mode, try to fly with multicopter mode only (may be easier for the analysis) in any direction and attitude to see the behavior.
Just to cover the basics, did you or have you by chance calibrated the ESCs directly from the Rx, bypassing the FC, just to make sure that the proper endpoints are configured?
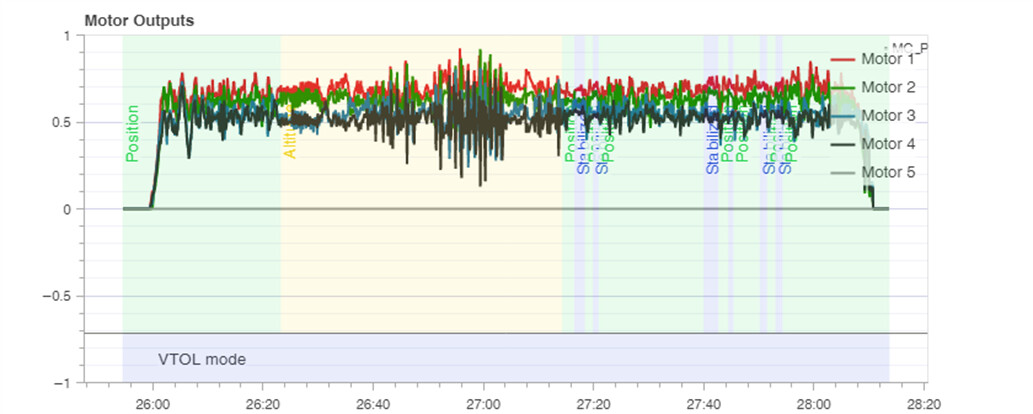
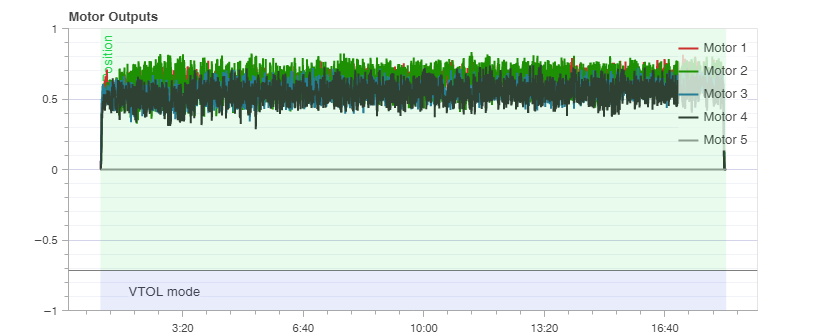
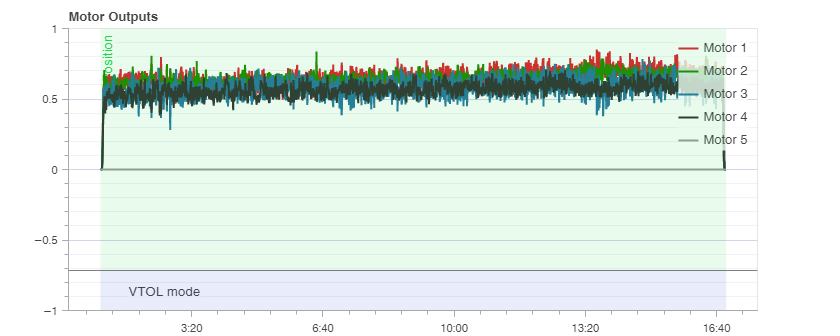
Hi all, We did the test last week with ESC calibration and D value down. We were able to confirm that the heat was definitely less than the original value.
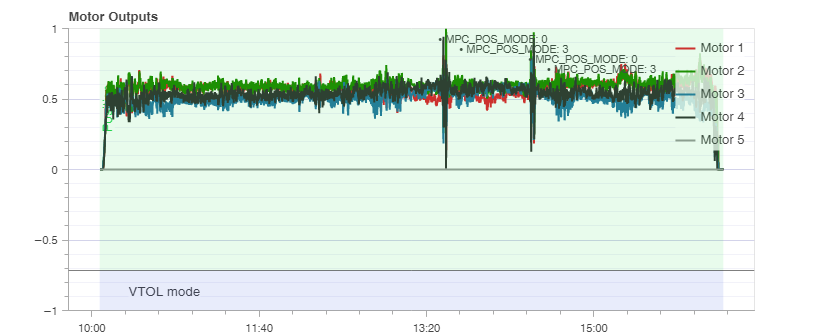
I enable the flight log with a high rate
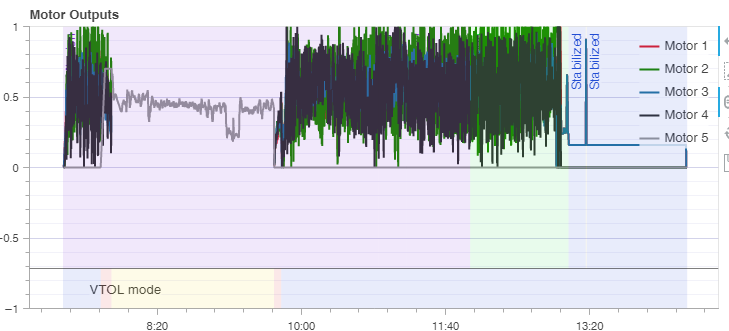
Logs: https://logs.px4.io/plot_app?log=506f811d-aaca-4b7d-b2ad-79bc2d536311
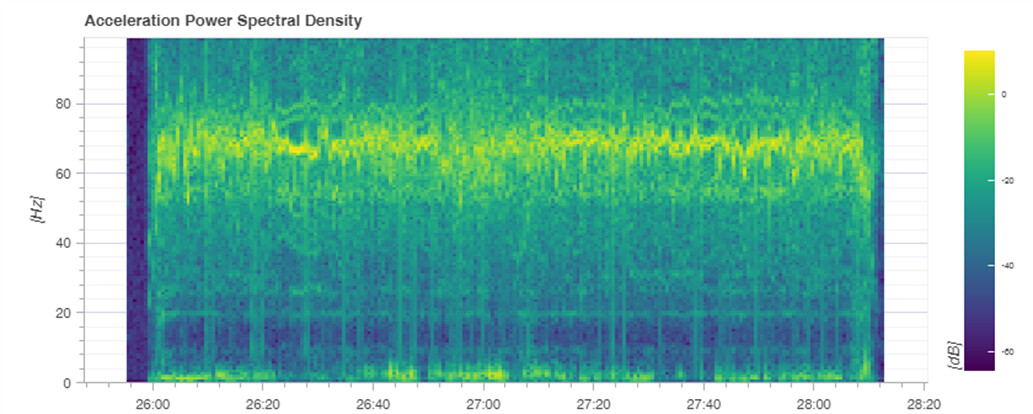
Is any problem in FFT?
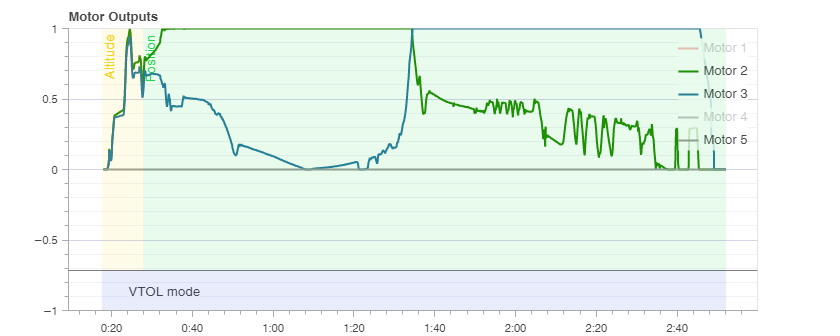
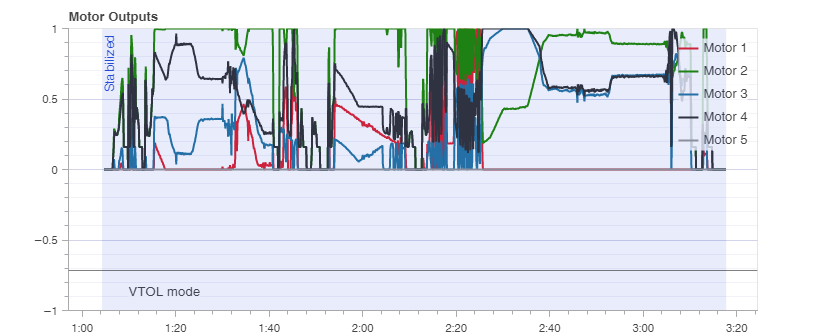
The plane was more serious and the motor broke down in three minutes. I think the reason for the failure is that the PID value of the first plane was applied as it is.
Oof, with the X/Y accelerometer values reaching ~5 m/s^2 magnitude, that’s a big oscillation/vibration!!
Could you please check:
What is causing this vibration (I highly suspect that the Flight Controller is mounted in an insecure way, or there’s something vibrating the whole frame heavily during flight)?