I’m flying a X500 frame for the first time with a Pixhawk 6C controller that I have previously used successfully on another airframe.
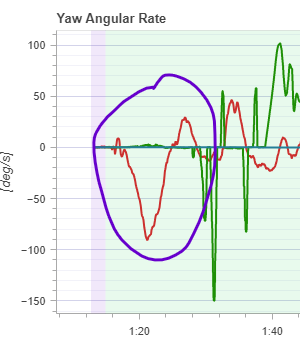
Immediately once I give some throttle in position mode, the airframe starts to yaw rapidly with no yaw input from the control stick (confirmed with the control stick input record in the log). See the chart below where the estimated yaw velocity (red) significantly deviates from the setpoint (green).
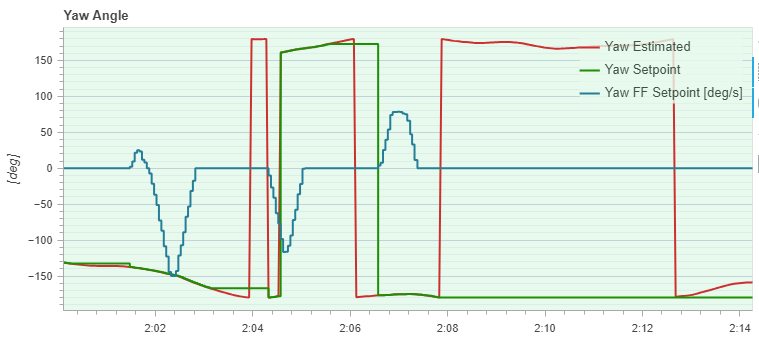
Later on in the flight, I gave a number of yaw inputs with no response in yaw on the airframe (see below). In fact, when I gave yaw inputs the airframe was more likely to change altitude with no change in yaw.
The logs are showing a lot of error messages with the language below. I don’t know how to find out what ‘Estimator source 8’ is or how to resolve this. I have not been able to find any documentation that could assist with this message. ERROR [mavlink] Estimator source 8 not supported. Unable to publish pose and velocity
Not sure if this is the only issue but your Thrust should not be correlated to the magnetic field strength. As a first step I would fix that. There are some guideline regarding this in the documentation here
@Katawan, thank you for such a prompt response. I was finally able to perform the field strength compensation as you recommended and do another flight.
I actually saw approximately the same behavior. The drone basically was yawing uncontrollably and I don’t really understand why.
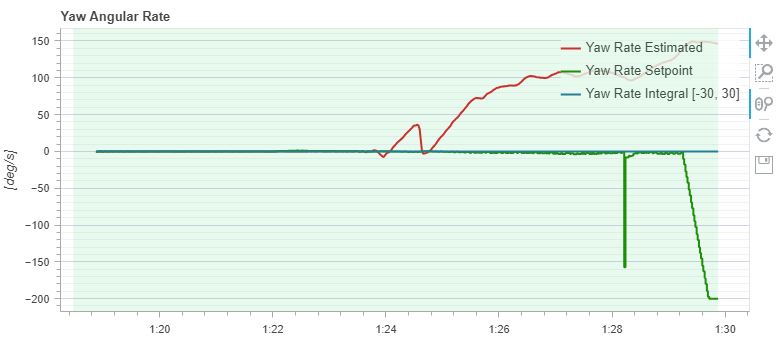
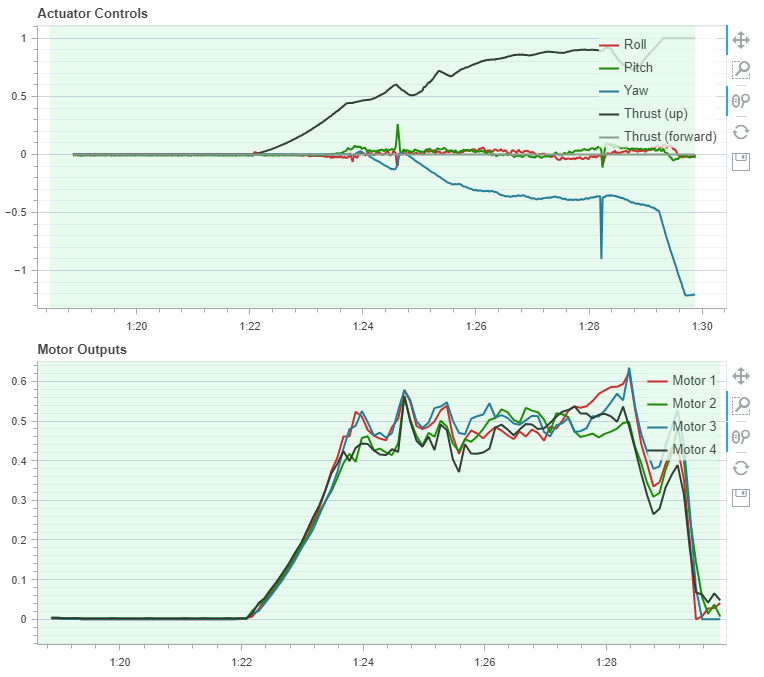
You can see below that the estimated yaw rate deviates significantly from the setpoint but in the next charts the actuators start to try to correct the yaw but I’m not seeing a significant bifurcation of the CW and CCW motor speeds that I would expect the drone to use to rapidly change the yaw rate.
I have checked that the motors are all spinning in the correct direction and that each motor is properly aligned but I’m not sure what to try next. It seems like the estimator understands that it’s out of control but it doesn’t seem to be reacting quickly to resolve it.
Sorry for really late answer. Did you succeed to fix your issue ? I had a similar issue once and it was due to motors not tight enough on the arm. Even 3-4 degrees on one motor is enough for the drone to spin but as you mentioned you check the tilt of the motors and none of the motor outputs goes crazy. Maybe it is necessary more expert people here if you still did not fix it