Hi All,
I have a Holybro x500 v2 quad-copter frame that I have been using for the majority of my research project. I’ve noticed this for a while but have finally decided to take on the task of figuring out why my actuator outputs are all different.
An example of this can be seen in the figure below:
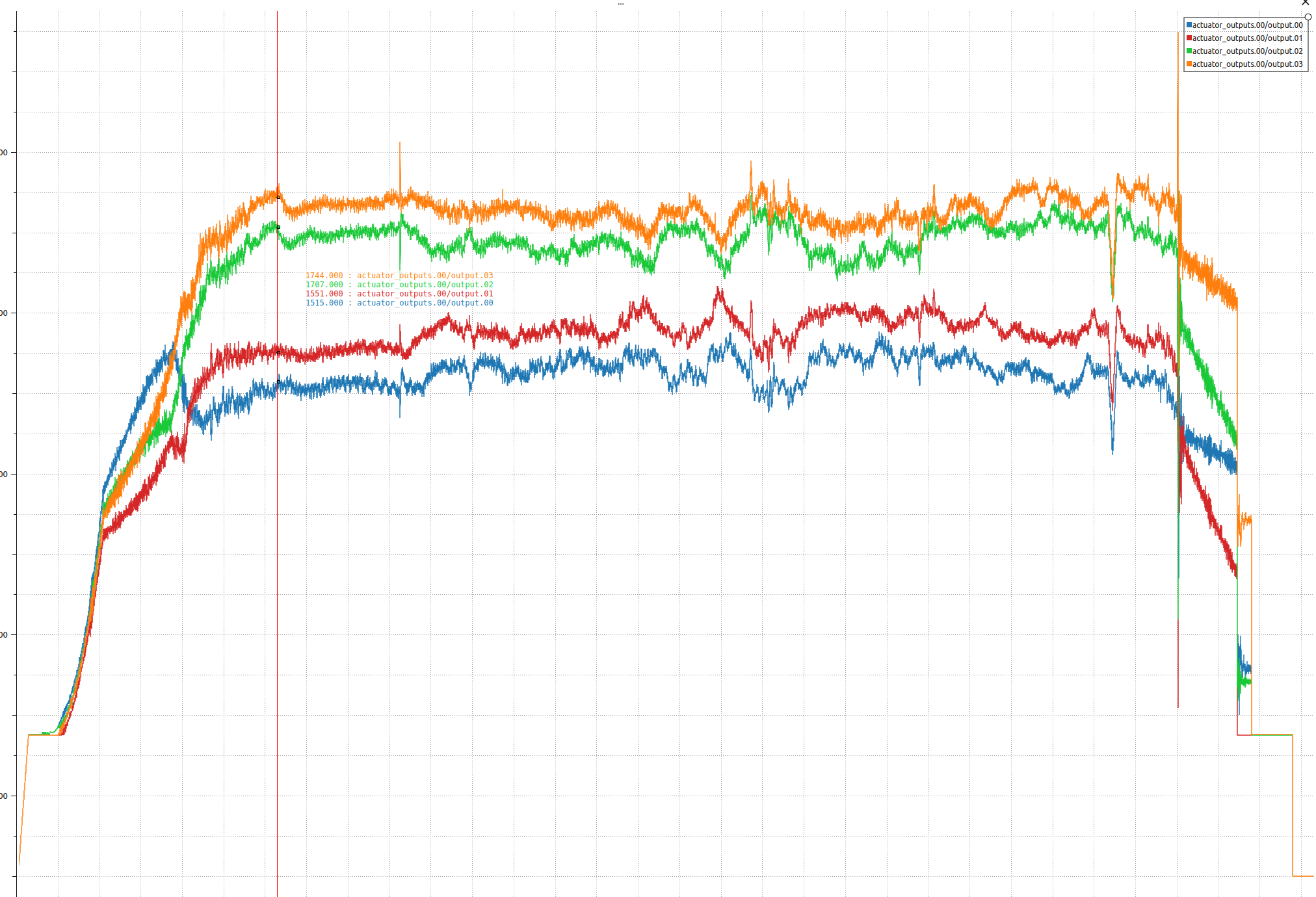
During my usual flights, I normally fly in offboard mode via microRTPS (px4 v1.13). Some observations I’ve noticed is that my y-axis (NED frame) seems to be the worst and the drone experiences oscillations in this axis for a while before settling (most likely just a control issue but my x-axis seems to track fine).
Apart from this, the major observation is when going into POSCTL mode and flying using an RC controller, there is a notable yaw bias (clockwise rotation w.r.t to NED). This seems to align closely with the graphs I have been observing from the Actuator Output logs.
To debug I have done the following:
- Change each motor on the quad separately
- Change the ESCs separately
- Calibrate the ESCs
Here are some log files to observe if anyone is interested:
https://review.px4.io/plot_app?log=2e9cee99-418e-4244-bfc4-13961648c555
https://review.px4.io/plot_app?log=2fafa8d7-2fa2-43ac-8fd8-3674f758b317
Any advice or help is appreciated! Thanks!