Dear Benja:
Thank you very much for the detailed explanation.
There is my system overview. Yes, I connect Pixhawk to Jetson Tx1 through the TTL-232R-USB cable.


I have the rosbag record and a camera running on the Jetson TX1.
Besides the log and code for descending, I also run the rosbag record and python script in terminals.
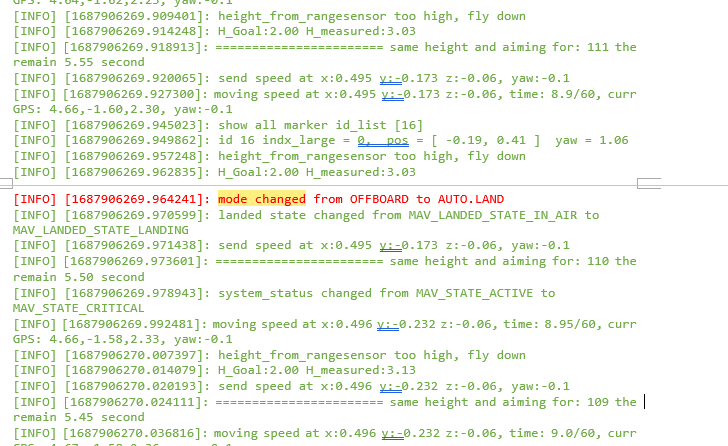
The python script running in the terminal shows the “unexpectedly mode changed from offboard to AUTO.LAND”, at the timestamp 1687906269.
There is the full terminal record
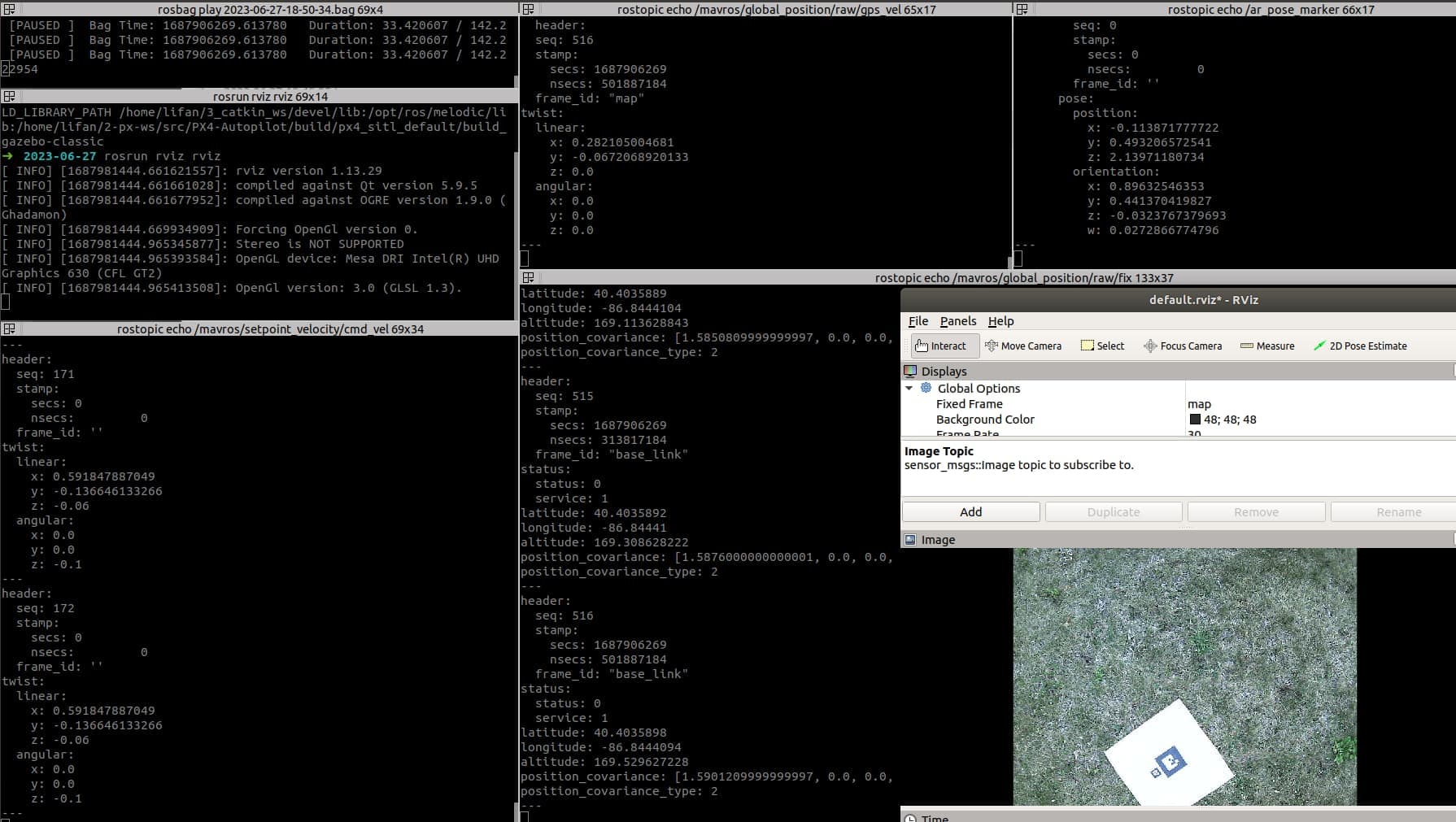
However, the rosbag also looks ok, at the timestamp 1687906269.
There is the full log video and rosbag file.
I further change
COM_OBL_ACT from 0 to 1 (Hold mode)
SDLOG_MODE from 1 to 0 (Record log during arm and dis-arm)
and flied three tests today.
1st flight (RC manual control) log
2nd flight (Offboard control - hover) log
3rd flight (Offboard control - descend) log
I find that the the disconnect issue also sometimes happens in hover.