Thank you very much for your help.
The drone suddenly loses the connection during the offboard control and switches to the AUTO.LAND mode, repeatedly three times in a single flight.
There is the log.
On the other hand,
In the terminal log in Jetson TX1, where running
roslaunch mavros px4.launch fcu_url:=/dev/ttyUSB0:921600
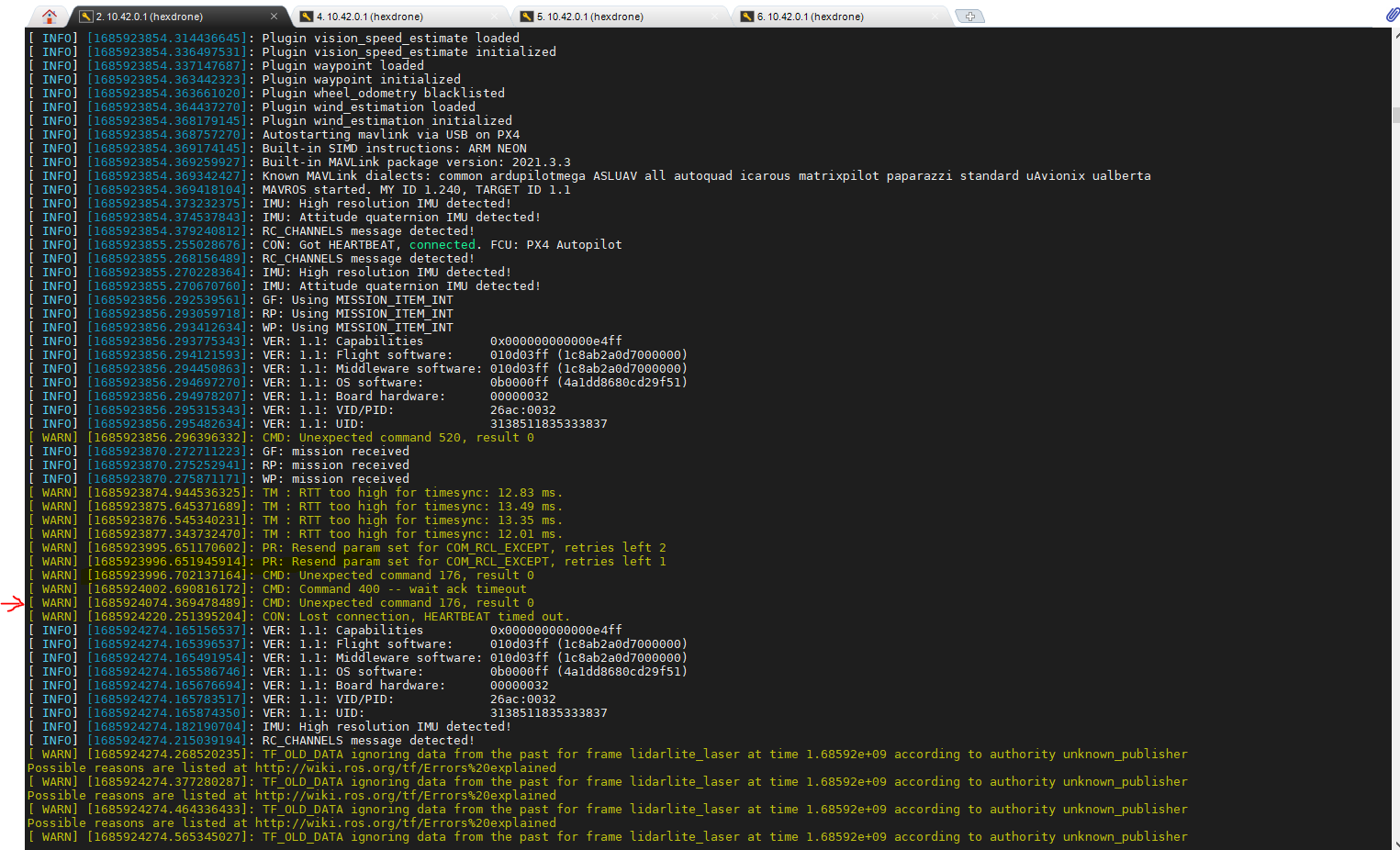
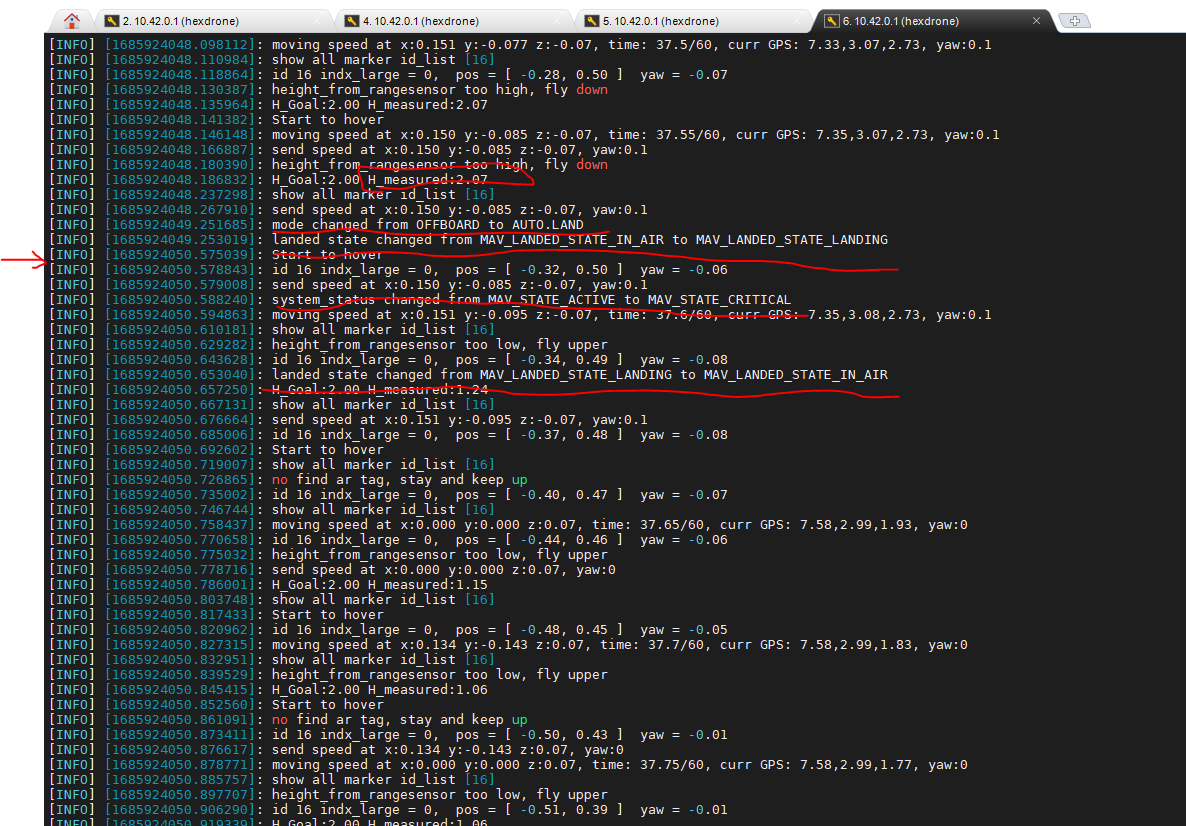
And the terminal log in Jetson TX1, where running
cd PX4_ws/src/PX4-Autopilot/integrationtests/python_src/px4_it/mavros
python June_4_hover.py
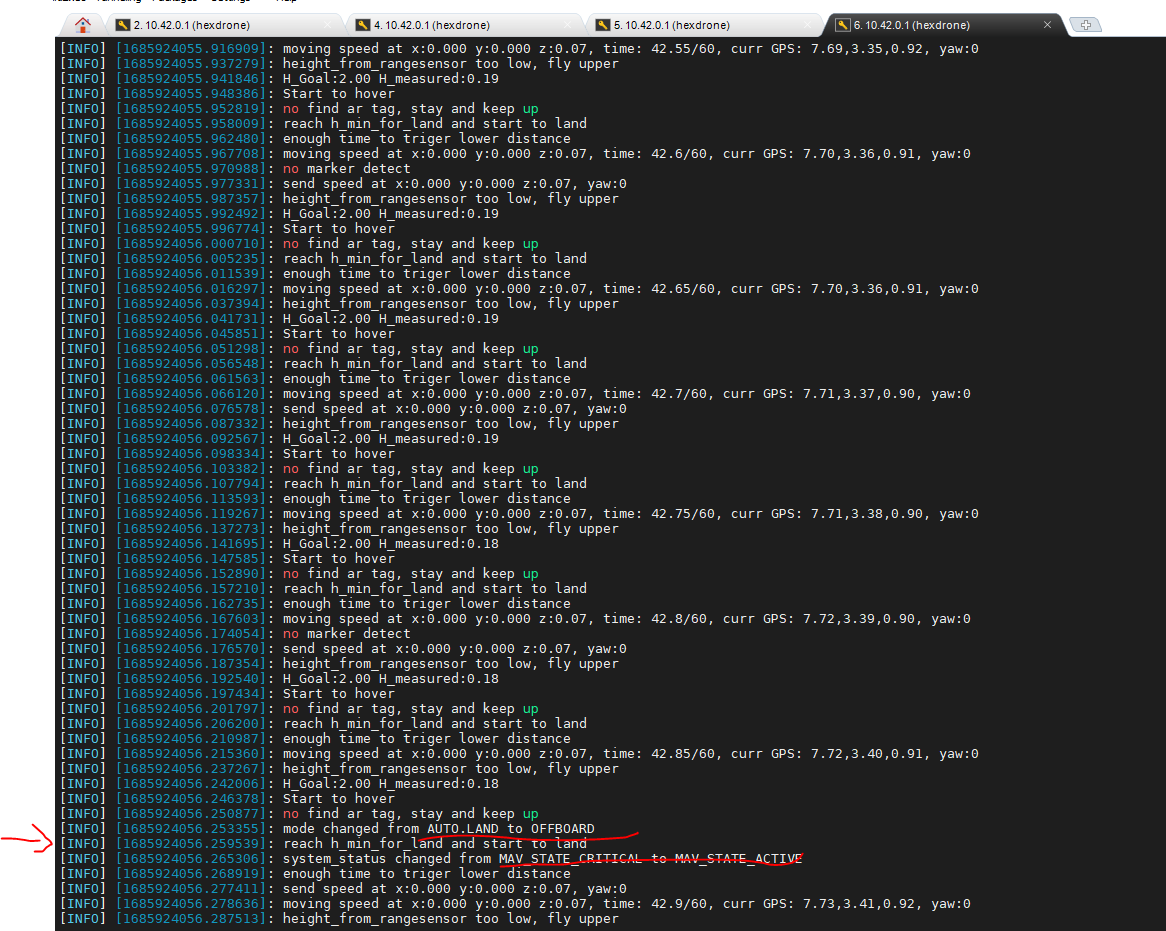
The code should be fine because it only calls AUTO.LAND once, only when the height measurement is lower than 0.5 meter.
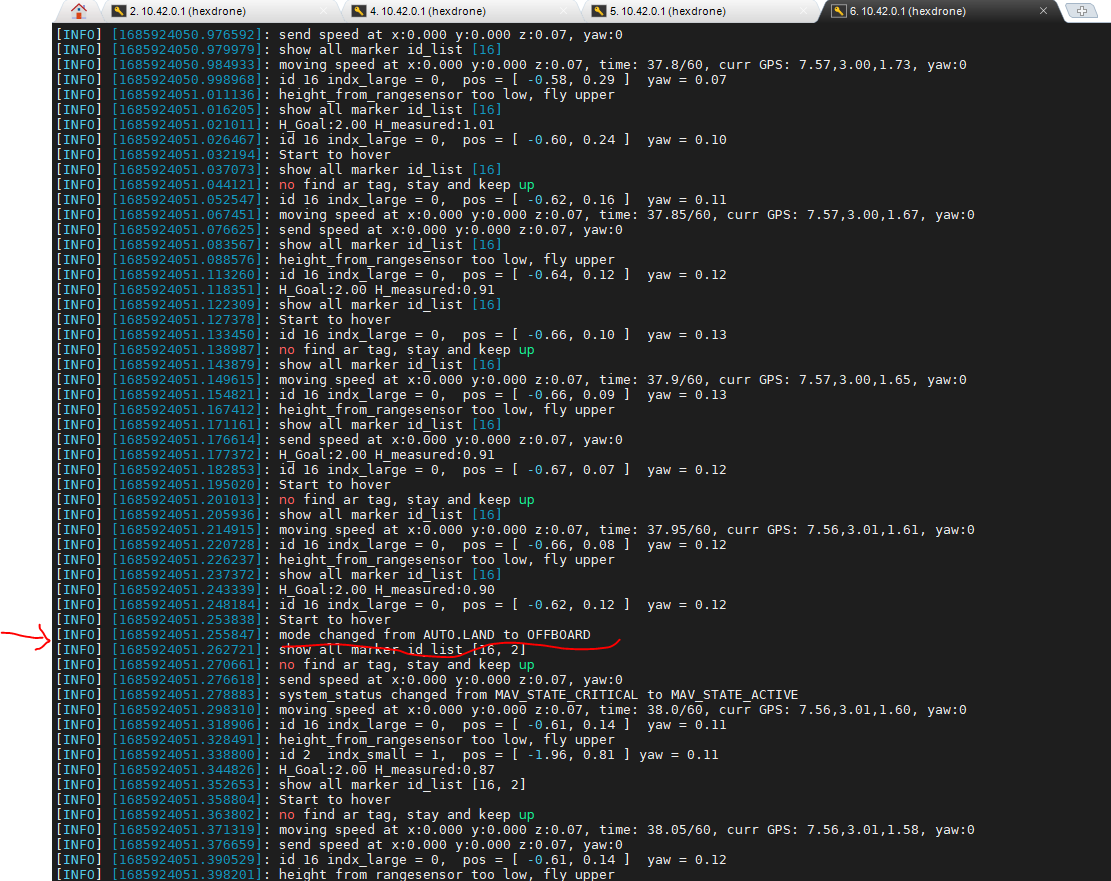
The second time lose connection and AUTOLAND.at time stamp: 1685924051.255847.
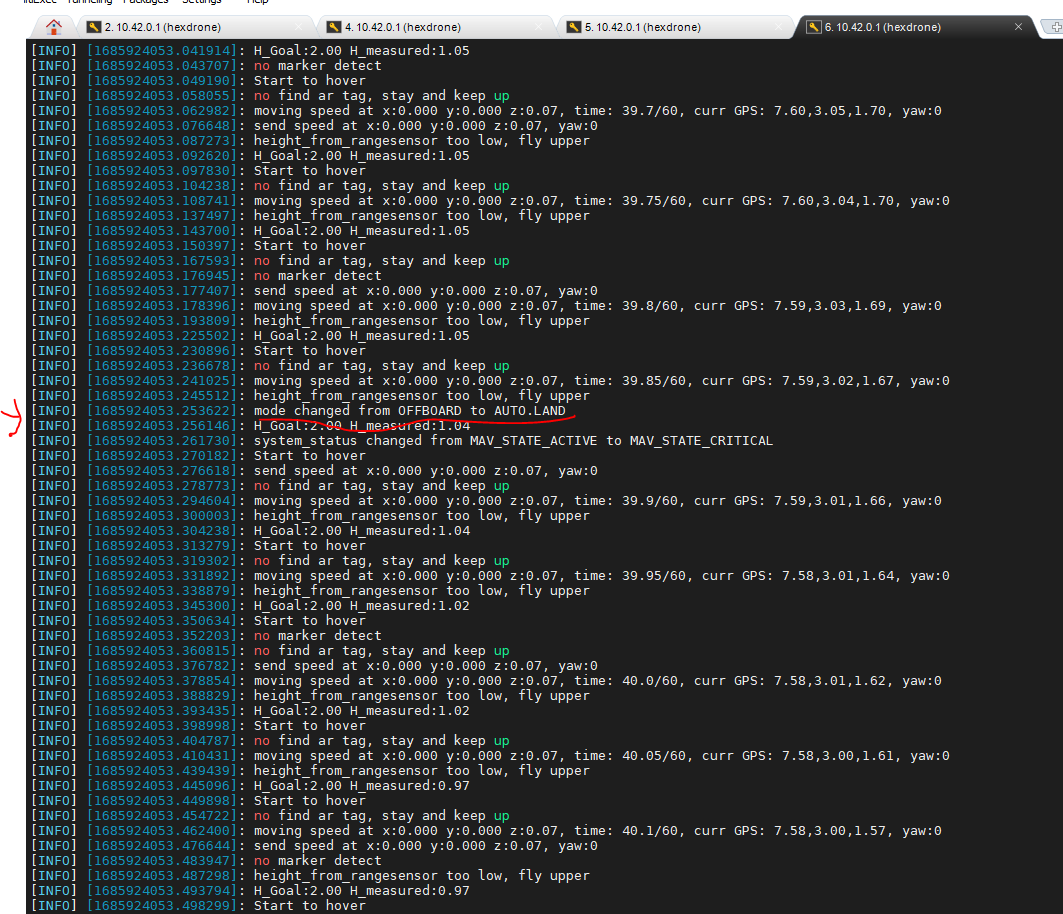
The third time lose connection and AUTOLAND.at time stamp: 1685924053.261730
It re-gain connection and switch back to AUTOLAND.at time stamp: 1685924056.265306