Thank you very much for the information.
It is very helpful.
According to the document,
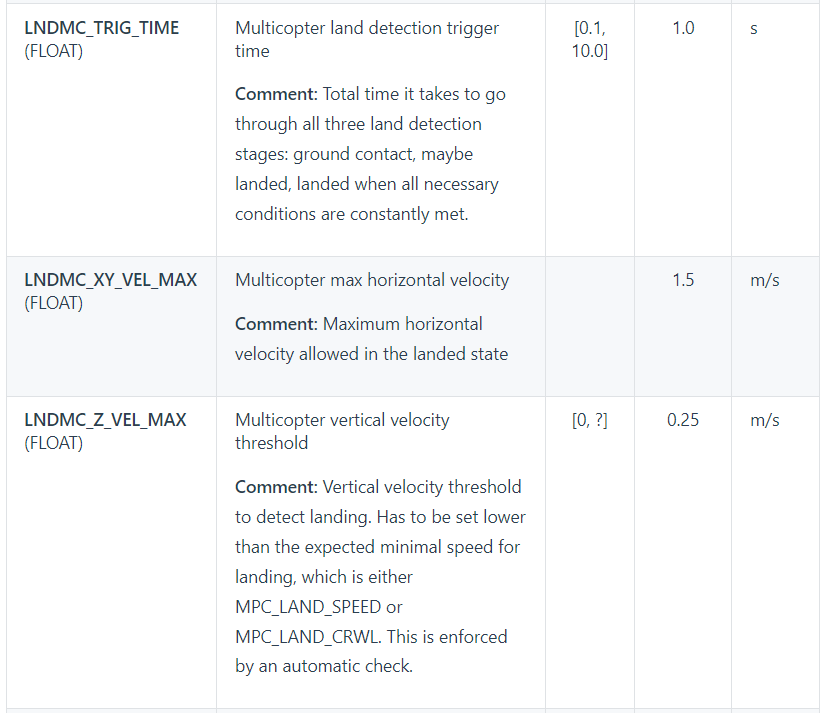
LNDMC_XY_VEL_MAX and LNDMC_Z_VEL_MAX are to set the max velocity allowed landed state.Thus, if decrease the value, maybe the drone may never land, because the drone flies at the speed over the
VEL_MAX?
On the other hand,
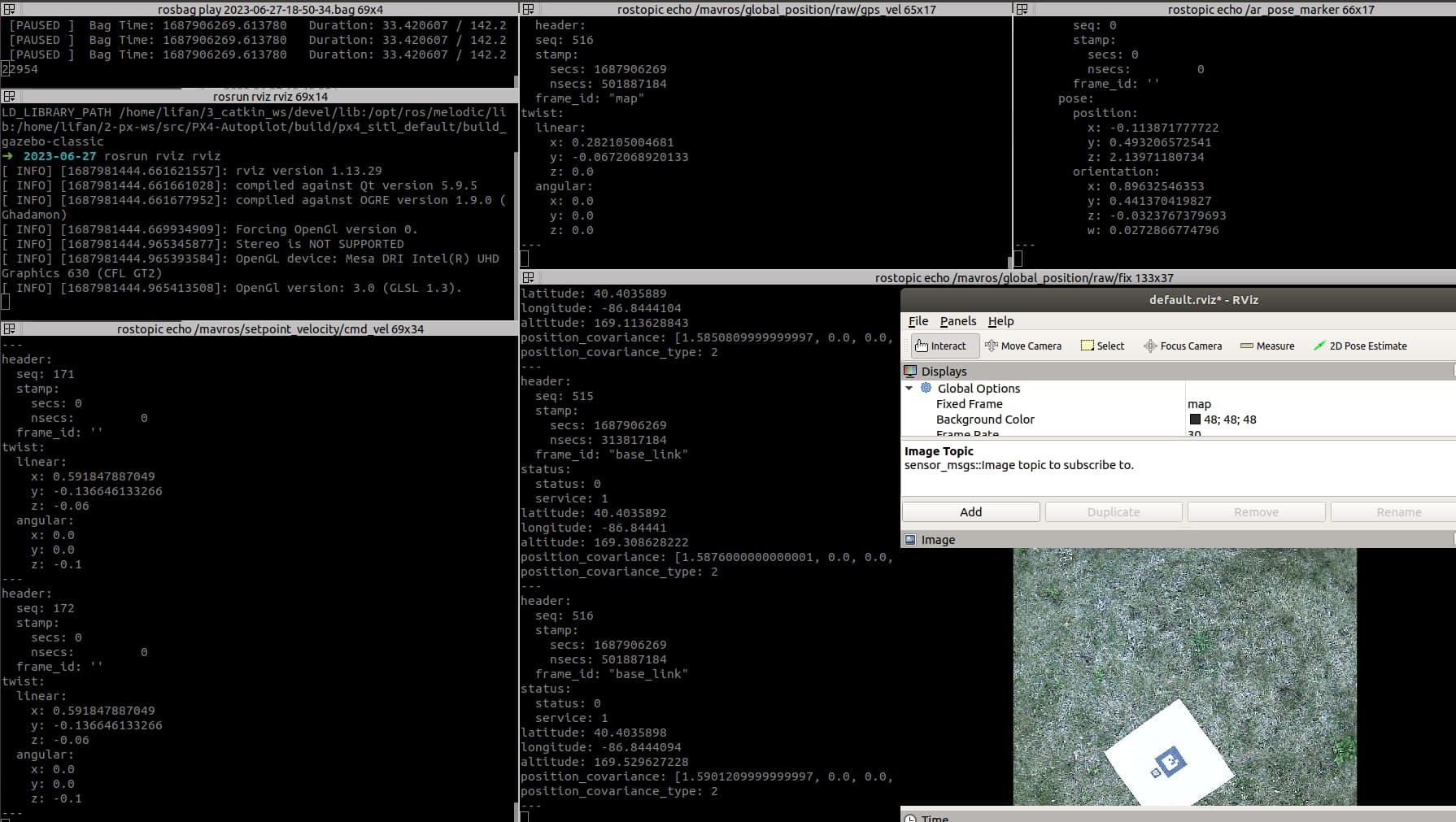
my current overall XY and Z velocity is lower than 1 m/s, according to the log and the topic /gps_vel.
3rd flight (Offboard control) (land) log and terminal happened
“unexpectedly mode changed from offboard to AUTO.LAND”
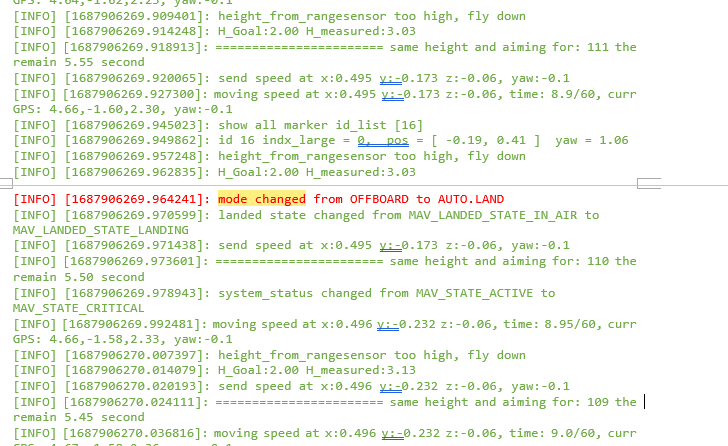
but, the velocity looks ok at the time 1687906269. There is the full log video.
Thus, I am suspecting some possible reasons may unexpectedly trigger AUTO.LAND during offboard control.
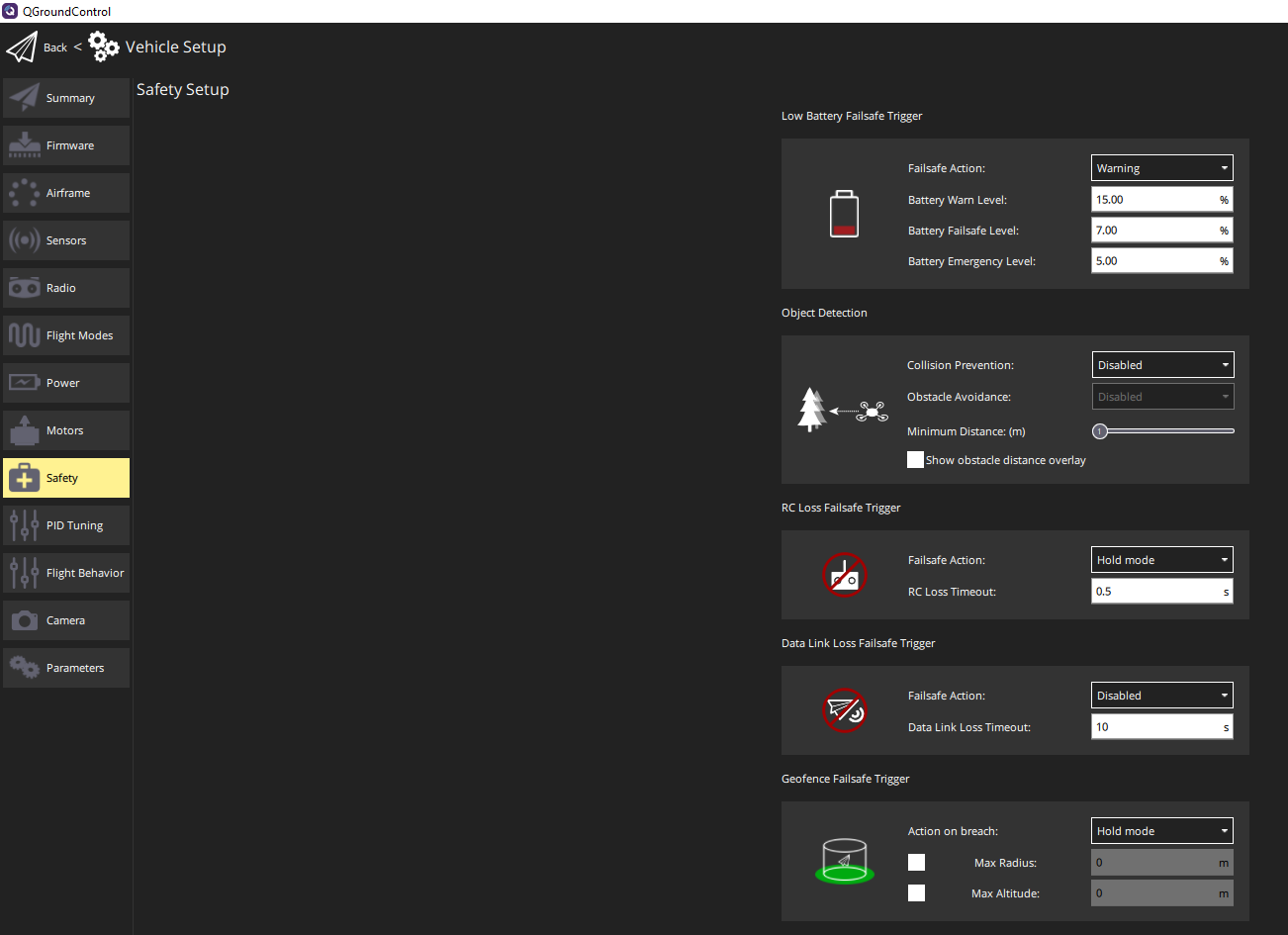
- Low Battery: If the battery voltage drops below a predefined threshold set in the flight parameters, Pixhawk and QGroundControl can automatically trigger AUTO.LAND mode to ensure the aircraft lands safely before the battery is depleted.
- Lost Communication: If communication between the ground station (QGroundControl) and the aircraft is lost for a specified duration, AUTO.LAND mode can be triggered as a failsafe mechanism to initiate a controlled landing.
- Failsafe Conditions: Pixhawk and QGroundControl have configurable failsafe conditions that can be set by the pilot. For example, if the aircraft loses GPS signal, experiences a loss of control link, or encounters other predefined abnormal conditions, AUTO.LAND mode can be automatically triggered to ensure a safe landing.
- Geofence Violation: A geofence is a virtual boundary set by the pilot using QGroundControl to restrict the aircraft’s flight within a specific area. If the aircraft breaches the geofence boundary, AUTO.LAND mode can be triggered to bring the vehicle back to the ground safely.
I may exclude 1 and 4, because there is no warning in the log. Battery is full and Geofence is off.