I’m building a drone with PX4 and want it to be safe and stable. What should I do to achieve this? What factors affect the flight dynamics of the drone?
The system I use:
Firmware Version: 1.14.3
PX4: CUAV Pixhawk V6X
Frame weight about 5 kilos
This is the motor esc I use
Note: Since the ESCs do not support DShot, I am using 400Hz. I am also using the main(IO port) section for output.
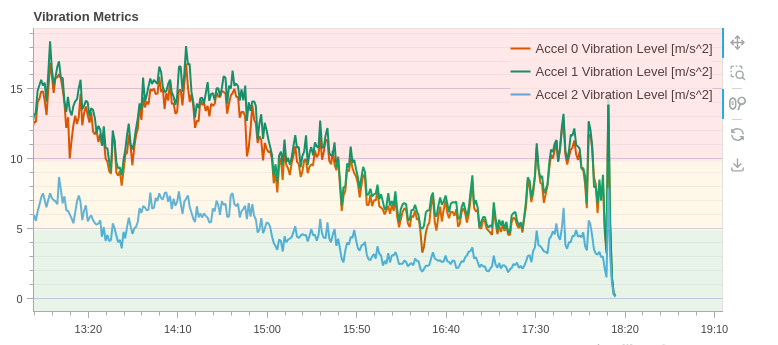
I tried to analyze the log files and I think the vibration seems excessive, but I’m not certain.
In this section, there are 3 IMU data streams and two of them are displayed in red. What does this mean? Aren’t all three IMUs inside the PX4 board? Why do they look so different? How should I interpret this? (Vibration Metrics)