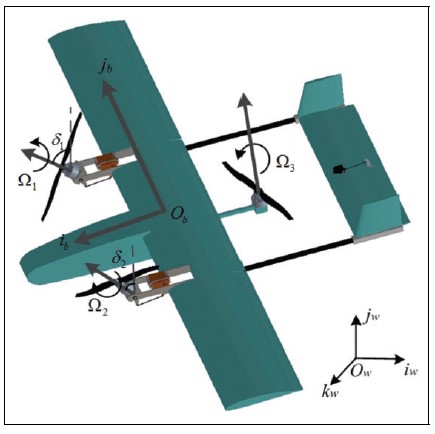
I used Generic Quadplane VTOL Tiltrotor. Programmed it to run as Tricopter. Having lots of problems in hovering. When I start all motors with servo tester plane seem to hover as predicted. But when I hook up PX4 tail motors goes nuts. I selected standard Generic Quadplane VTOL Tiltrotor. Modified it to 3 motor configuration. In hover the plane tries to roll on its back. something is wrong. Please help!
In the log, the autopilot tries to command a negative roll (i.e.: left bank) while on the video, it seems that the plane tries to do a right turn. Are you sure the motors are wired to the correct outputs?
Also, note that the magnetometer is highly influenced by some magnetic field (from the drone or the laptop below it); this will create a heading issue
Bresch, Thank you for the reply. If, you look at the video when I run the motors using servo tester the plane hovers correctly. In the backyard the plane still behaves the same (left motor high, right motor low, tail motor high). My GPS broke so, at this point I am running without the GPS until the new GPS is delivered. The AIRFRAME is for QUAD VTOL PLANE. I modified to tricopter i.e (2 front motors, 2 front servo and one rear motor (non-tilt) in hover).
When I transition to forward flight the control surfaces and planes behaves in a predictable flight envelope. having said that I have not maiden this plane. On the ground forward flight looks good. Just the hover is giving me headache.
They don’t make convergence anymore. I have been flying convergence for 5+ years and its a wonderful plane but with a fatal flaw. Convergence eats up servos very fast and a crash. I beefed up my convergence with upgraded ESC’s and stiffen up airframe with carbon spars. They flew like a dream. But I can’t get new airframes anymore. so, out of desperation started to convert my existing planes to VTOL.
Well, it’s doesn’t hover with a servo tester, the motors are just spinning at a constant RPM; this doesn’t tell you if the motors are connected to the correct output, you need to verify that the “motor right” output is connected to the right motor, “motor left” to the left motor and so on.
I selected standard Generic Quadplane VTOL Tiltrotor. Modified it to 3 motor configuration.
How did you modify it? Did you change the mixer to use: R: 3y
Otherwise you could also use the convergence airframe config and modify it to use the elevator.
Bresch,
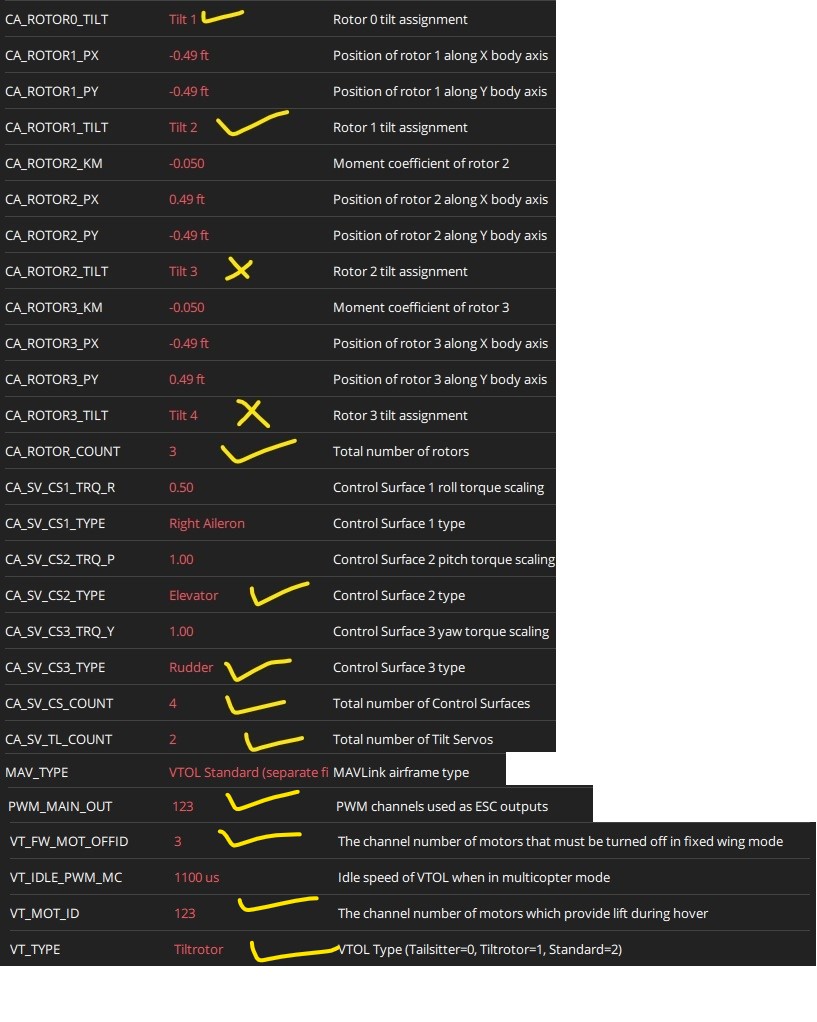
I used QgroundControl software and from menu selected vehicle setup \ parameters. As, I was going over the params and based on your feedback found some issue (screen shot). You maybe correct about motors are connected to the correct output. I also found Tilt rotor 3 & 4 set and should be null, since 3 is fixed and 4 is not present (tricopter). I will check motors to output and test in the morning.
It will be ideal to modify convergence file. Can you help me to modify control surfaces from Right & Left Elevon to use: Right Aileron, Left Aileron, Elevator, Rudder? It will be much appreciated.