My VTOL-Duo Tailsitter (PX4, FW V1.11.3) performs weird movements during taketoff and transition (MR to FW) in mission mode:
-
The YAW angle during takeoff varies arbitrarily, I don’t know how the YAW-setpoint is calculated during that phase but it looks weird. Repeating the same mission multiple times yields completely different (non-reproducable) results.
-
After transition from MR to FW the tailsitter performs strange movements. See this example here:
https://review.px4.io/plot_app?log=2b6e1e57-5566-459a-b4b5-86295eccd19c
Instead of flying directly from the takeoff location (marked as “V” in the map) to the first waypoint, the tailsitter makes a 180° right-turn to south east and then immediately turns again back 180° left to the first waypoint as shown here:
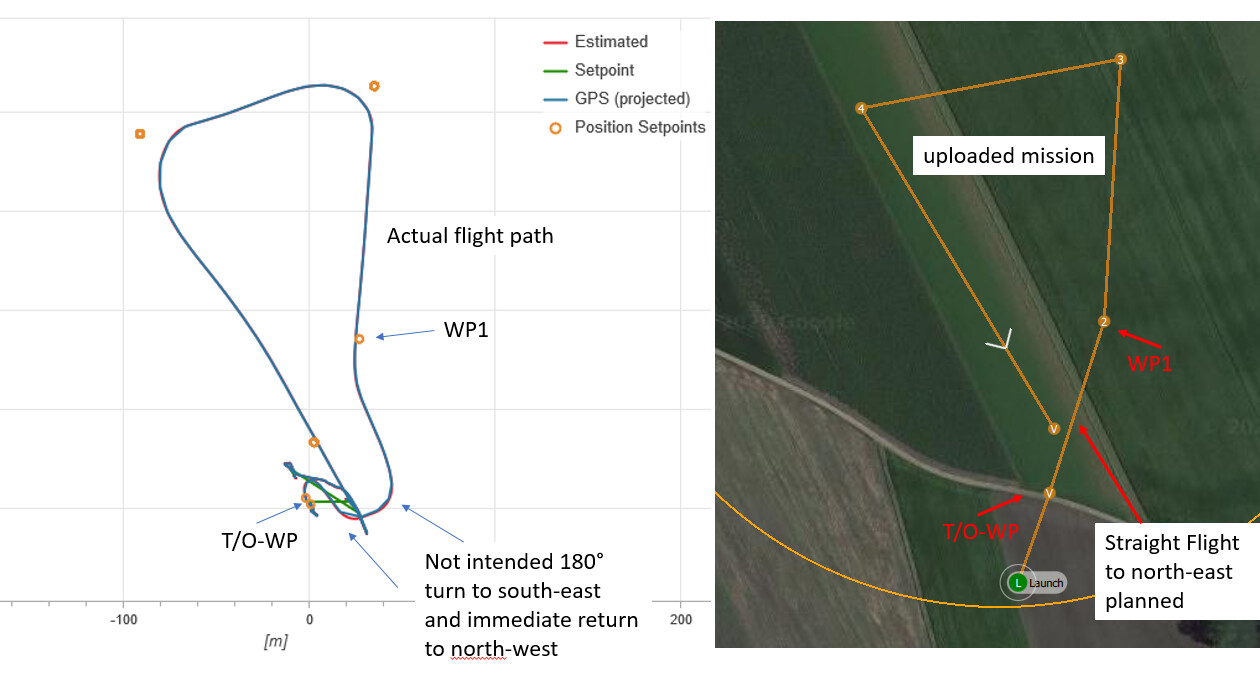
This occurs randomly. At some flights, instead of making a right turn as shown above, it turns left first before heading to the first waypoint as shown here:
https://review.px4.io/plot_app?log=8699d950-882e-47de-821f-0c1cd282b056
Any ideas what might be the reason for this?
In the logdata I saw that at the VTOL-takeoff-WP, two position setpoints are created (orange circles):
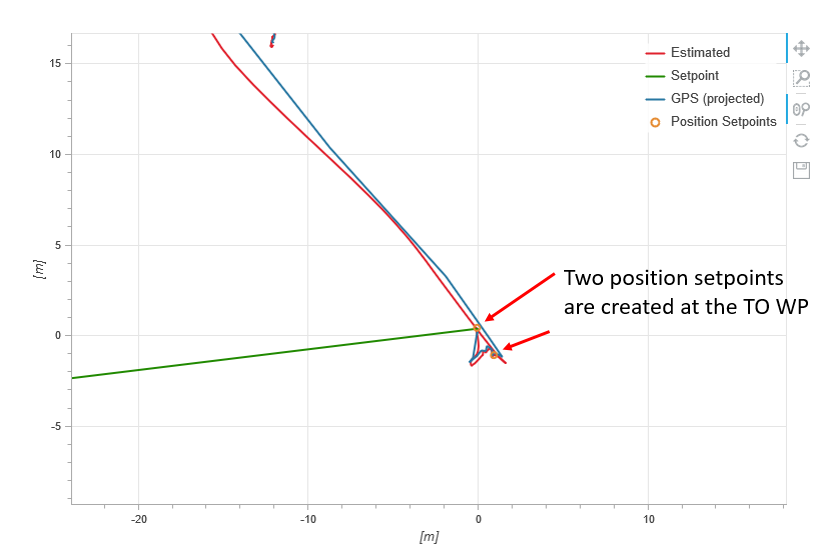
I think that the connection line between these circles is in line with the (random) direction where the tailsitter takes off to. How is that second position setpoint created and how can I influence it?
I didn’t find any information about how the implication of the launch-position in QGroundControl (see here):
Does it influence the takeoff sequence?
Thank you very much for your support!