Hello!
We are working with a VTOL platform, and are experiencing some strange behaviour with the yaw setpoints. During takeoff (before transitioning to FW mode), the yaw waypoint suddenly jumps, which cause the vehicle to suddenly change its heading. See the picture below:
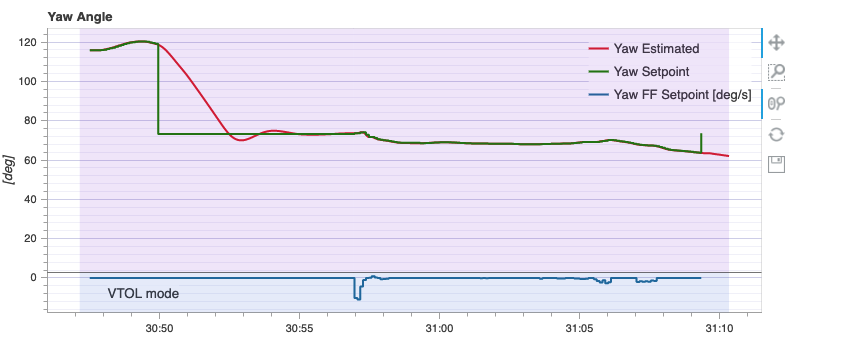
The same jump can be observed in the “local position” estimates. Due to the change in the heading, the mission was aborted and the vehicle was landed.
The entire log file can be found at:
https://review.px4.io/plot_app?log=3cfb7063-ef25-4e38-9cdf-2fcfc2352179
We are running an older version of PX4, namely 1.8.
Could anyone please shed some light on what is going on here? Thank you for your help!