I encountered an issue while flying a VTOL platform running PX4 v1.14. I had planned a mission with a relatively short backtransition segment, which resulted in the drone overshooting the intended landing waypoint. While still in autonomous mode, the vehicle attempted to turn back sharply while in a hybrid (fixed-wing + multicopter) state. This maneuver caused a steep bank, nearly leading to a stall, and we had to take over using manual position control to recover.
This behavior is concerning because had the drone continued flying straight, it likely would have completed the transition more safely and predictably. Upon reviewing the flight logs, I noticed a few confusing elements:
-
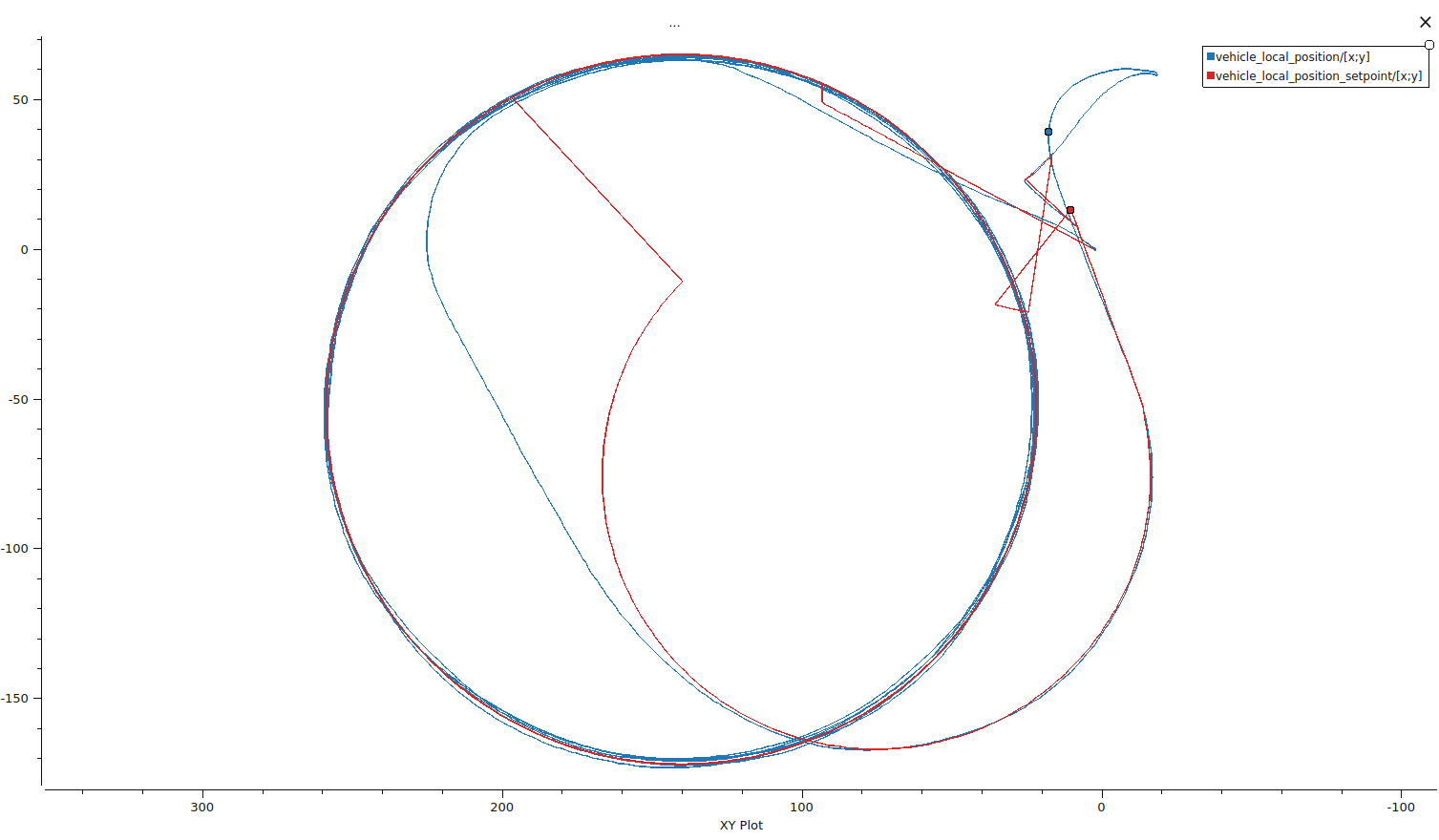
After passing the landing waypoint, the drone continues along a straight path. After some distance, it initiates an unexpected turn. At first, I thought this might be due to the waypoint acceptance radius, but the setpoint does not appear to change.
Figure 1. Red Point is the desired landing setpoint. Blue point is current position. -
Later, a completely new positional setpoint appears that differs significantly from the original landing point. I’m unclear where this new setpoint originates or what it’s intended to achieve.
Figure 2. Red Point new position setpoint that is completely random. Blue point is current position.

Overall, the expected behavior in this scenario isn’t clear to me. Specifically, I’m unsure:
- Why the drone initiates a turn before completing the transition.
- Why a new setpoint is generated despite no mission update or transition completion.
Any insights into this behavior—or guidance on how PX4 determines setpoints during overshoot conditions and transitions—would be greatly appreciated.