Hello, all!
This is a shorter (and Gazebo Classic simulation) version of Unexpected and dangerous behaviours after going in & out of Offboard mode.
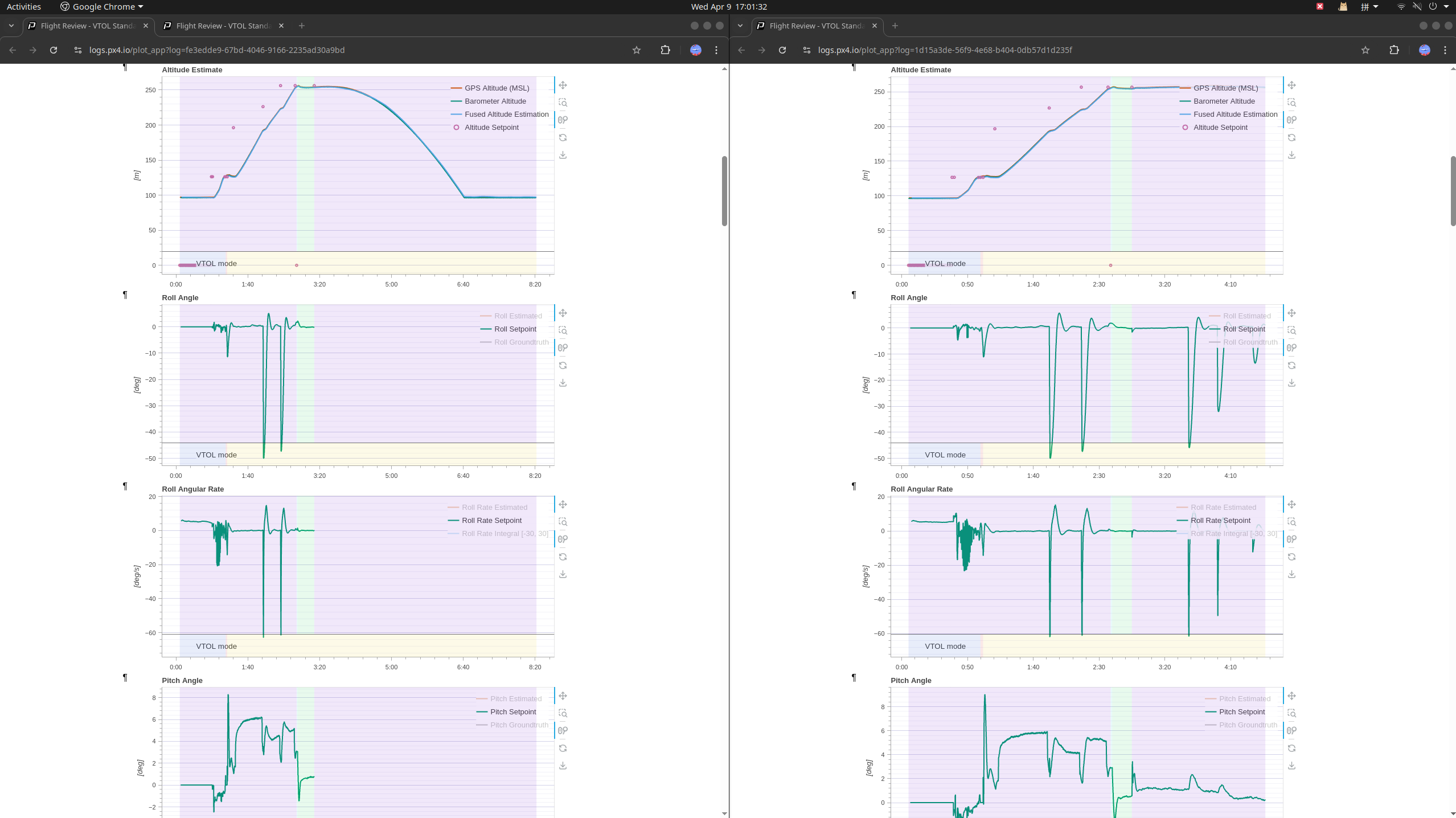
We are trying to reproduce and investigate the issue of Flight #1 in Unexpected and dangerous behaviours after going in & out of Offboard mode. Basically, we are testing with ROS2 Offboard control and now we are in the very first test, the test procedure is as follows:
- Start a Python script, waiting to send commands in ROS2 topic;
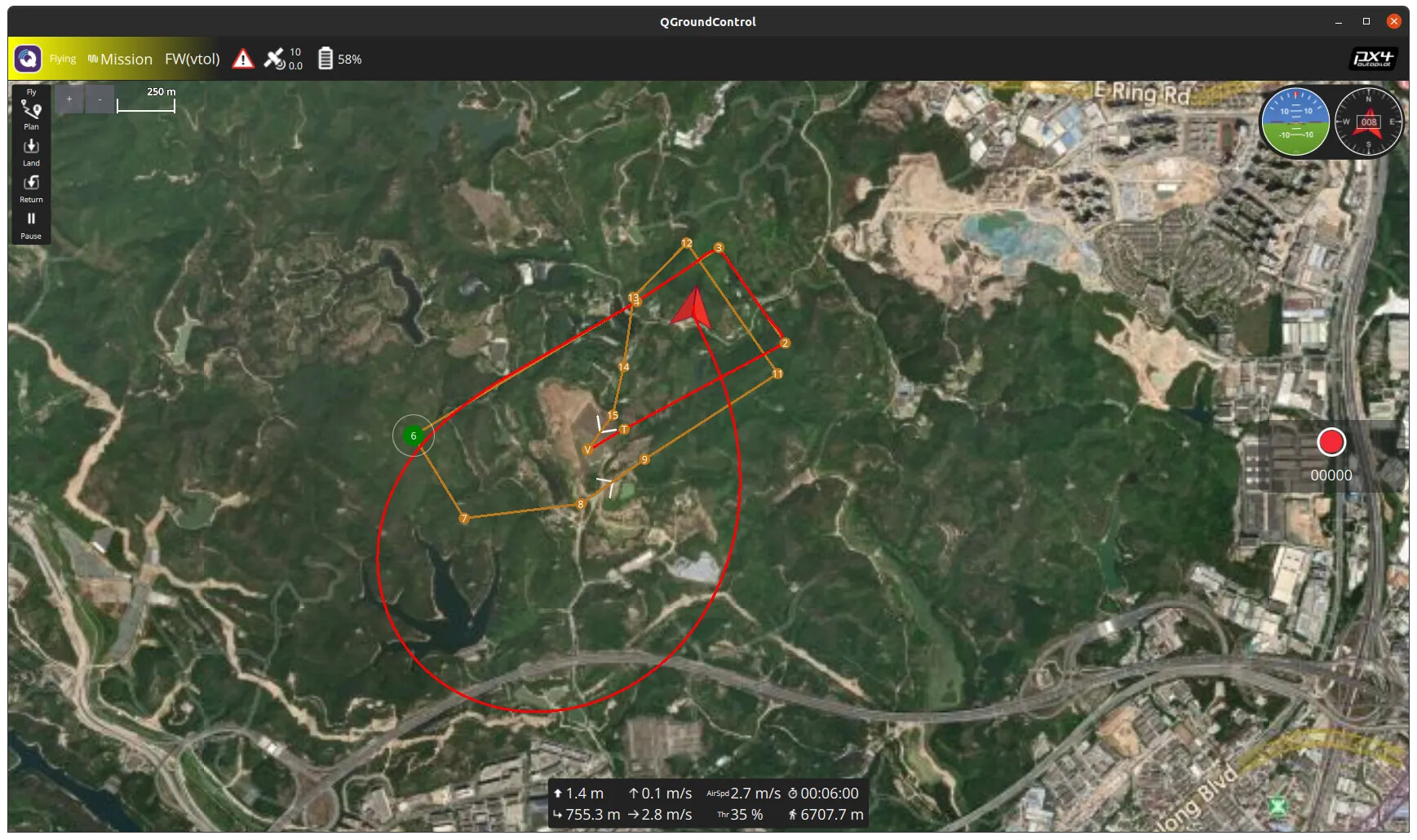
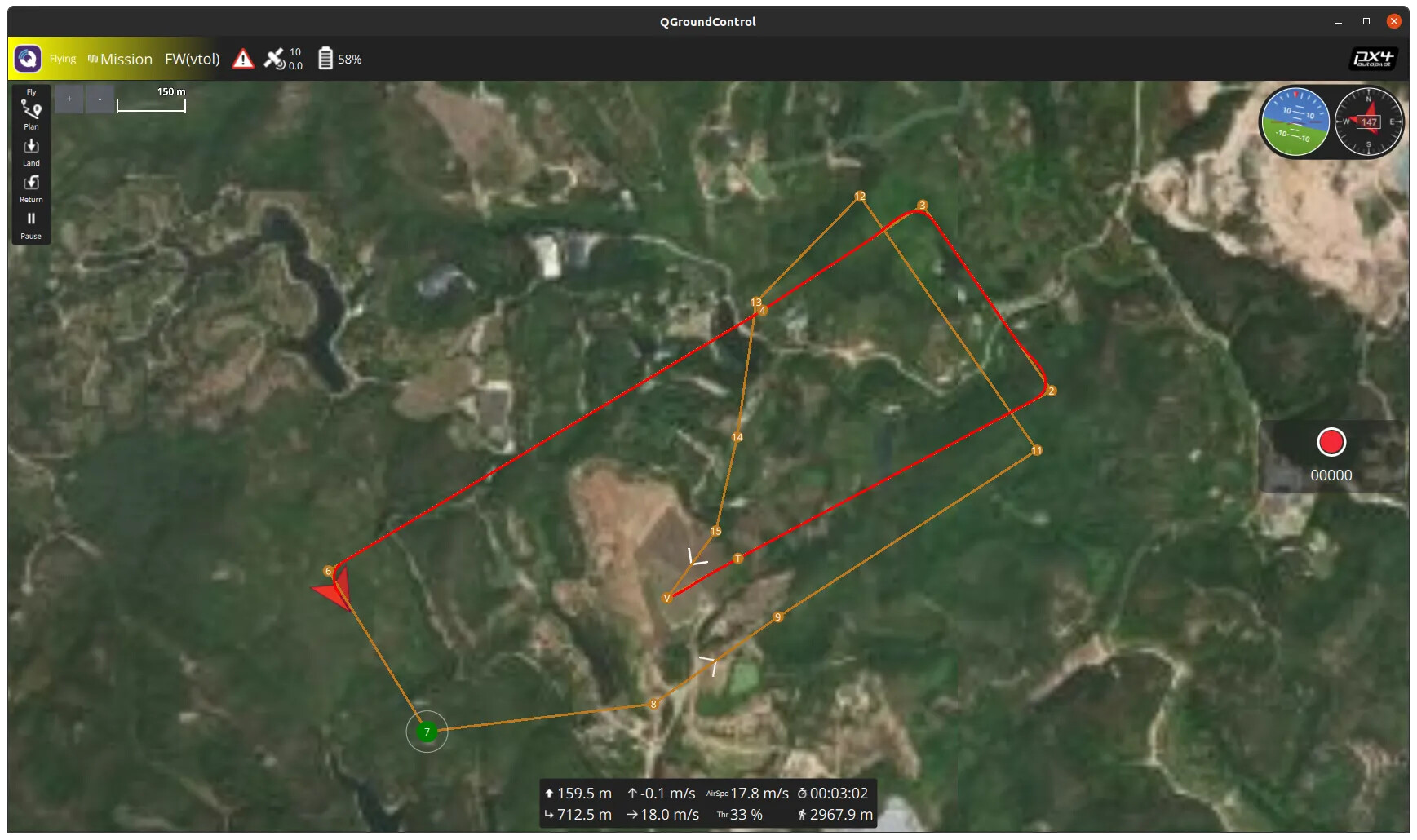
- Upload a plan in QGroundControl, including position waypoints and one
change_speedwaypoint; - Start mission in QGC;
- The script keeps waiting until near a certain GPS coordinate (coordinate of waypoint #5 in our case), then it sends command of switching into Offboard mode;
- The script deliberately exits, let PX4 fallbacks into Position mode;
- Mannually switch into Mission mode in QGC;
The reason why we deliberately let the code exits is that, we are trying to investigate Flight #1 in Unexpected and dangerous behaviours after going in & out of Offboard mode, where we were supposed to switch into Offboard mode for 1 second, but the code raised an error and exited, then the VTOL kept descending then crashed into the ground.
We repeated several times and found out that in some cases, the VTOL (standard_vtol to be specific) kept descending then crashed on the ground, but in other cases it followed the waypoints as normal.
Here are the PX4 log files:
Here is the Mission Plan file that we uploaded every time: basic_mission.plan - Google Drive.
We are reallly curious about the issue. Why did it happen? Why not every time? What possibly causes the issue? I will really appreciate it if someone could share some thoughts!