Hello,
we recently experienced some weird behaviour with our drone using the offboard mode after upgrading to PX4-Autopilot 1.15, which even led to a crash in one case. The drone seemingly can’t handle the commands it receives and starts decending rapidly to the ground.
Hardware:
- Flight Controller: Cubepilot Cube Orange
- Companion Computer: Jetson Orin
Case 1 (PX4-Review):
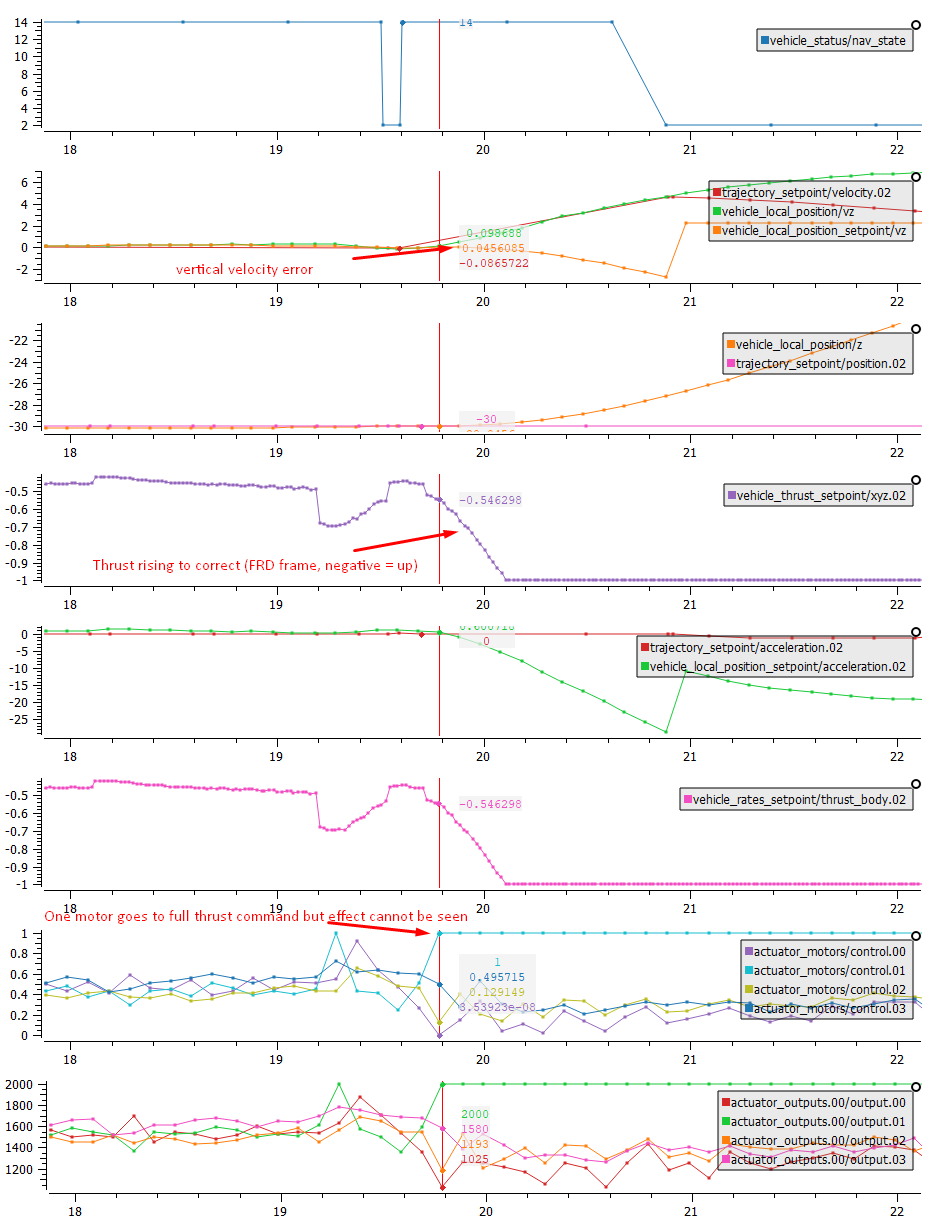
We planned an offboard mission involving an ascent to 30m, followed by navigation to several waypoints while maintaining altitude. However, after reaching the target altitude of 30m and receiving the first new (X, Y) setpoint, the drone began descending rapidly. We managed to recover it through manual intervention.
From the logs, it seems the drone attempted to reach the designated (X, Y) coordinates but failed to maintain its altitude. Suspecting that a combination of YAW control and position commands might be overloading the system, we decided to disable YAW entirely for the next flight.
Case 2 / Crash (PX4-Review):
This was another offboard mission with a similar setup: ascending to 30m, followed by navigation to (X, Y) waypoints, but with YAW fully disabled.
Initially, the flight proceeded well, and the drone reached the first (X, Y) setpoint after ascending to 30m. However, the same issue occurred: the drone began descending rapidly. According to the logs, the drone quickly switched to Position Mode upon encountering the issue but failed to hold its position and continued descending.
Unfortunately, we could also not regain control via RC inputs, and the drone crashed.
Additional information:
- The mission was tested extensively in simulation, where no such errors occurred.
- We did not encounter similar issues with PX4-Autopilot 1.13, and this problem raises concerns about the reliability of 1.15 for our use case.
- The hardware is unlikely to be at fault, as the drone performed flawlessly during prior manual mode flights. However we will not fully rule this out as the drone might get different commands during offboard compared to manual flight.
- Previous to the second flight we also started a offboard mission and intervened with stick-movement on the RC, which promted the drone to go into position mode and hold its position
- Parameter file
Given these circumstances and our inability to identify the root cause, we would greatly appreciate your insight into this issue.
Thank you in advance for your assistance!
Best regards,
Andreas Greiner