Hello. We have 2 recent failed flight tests in automatic mode. After the plane stands on the fixed wing, it falls smoothly down. We can’t figure out what’s going on in the logs.
-
FMU 1.10.1
video: https://youtu.be/v4uwJw481Xw
log: Flight Review
-
FMU Master (1.11 beta)
log: Flight Review
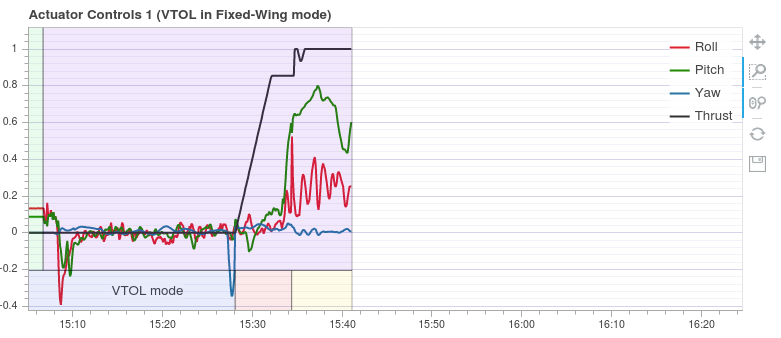
From log 1:
After the drone completes the conversion from multi-rotor to fixed wing, the thrust output is immediately saturated
And the pitch angle is also set to the maximum value (20) trying to make the aircraft climb.but failed
So I suspected that the fixed wing thrust and structural design of this aircraft were poor.The maximum thrust cannot allow the fixed-wing UAV to obtain sufficient airspeed, so the drone falls.
have you ever tried to use this model to successfully fly in fixed-wing mode?
Hello.Thanks for the help. We have several successful flight tests.
For example:
-
position mode MC-FW-MC
https://review.px4.io/plot_app?log=bc08b14b-87cd-47c4-8b45-8ceef1cdf3d1
-
Mission MC-FW-MC (in back transition there were some disturbances and I intercepted over the controls)
https://review.px4.io/plot_app?log=87b9a9da-d0e5-4ed8-b5b2-71f79f180d44
Common video: https://www.youtube.com/watch?v=qCBwdosSqps
Is there any difference between these two flights? I saw you changed the code yourself…
It looks like the main engine ECS is shutting down at maximum current. The ESC is designed for 120A, and the motor runs up to 140A. We’ll check it on the ground to make sure and replace the motor and regulator with a new one.
We conducted an experiment on earth and looked at the behavior of the motor and ESC. ESC burned out, but the current graph looks similar to what was in the air.
https://review.px4.io/plot_app?log=b47b7423-7618-4966-a9d7-d6f5e520a0c0