Objective:
To visualise point cloud from my depth camera with pose and path taken by the craft
My setup:
Px4 autopilot sitl, x500_depth vehicle, simulation running on gazebo, and bridged ros-gz for camera and depth camera topics, QGroundControl, Micro-XRCE agent for working with ROS2 humble with px4 sitl, rviz2
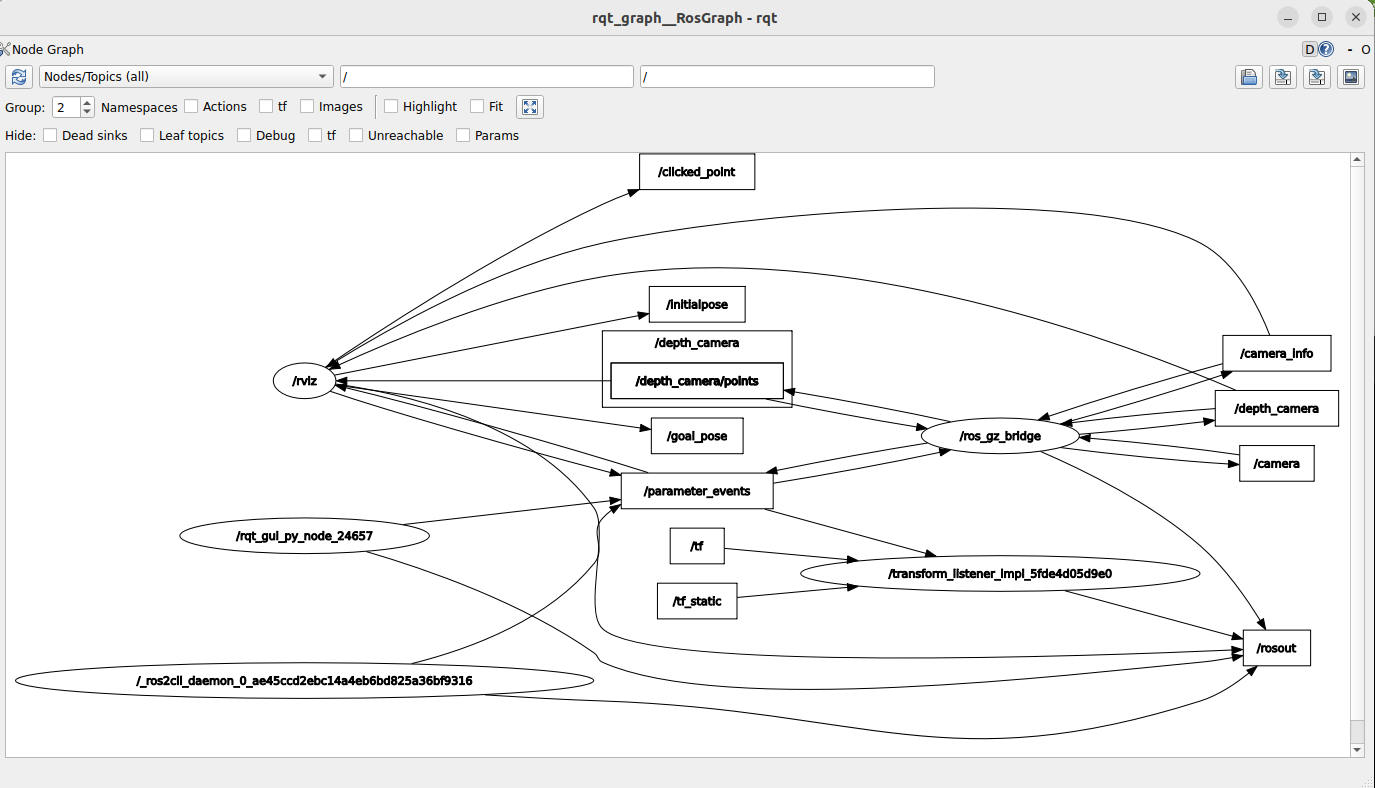
ros_gz_bridge for camera and depth camera topics
ros2 run ros_gz_bridge parameter_bridge /camera@sensor_msgs/msg/Image@ignition.msgs.Image /camera_info@sensor_msgs/msg/CameraInfo@ignition.msgs.CameraInfo /depth_camera/points@sensor_msgs/msg/PointCloud2@gz.msgs.PointCloudPacked /depth_camera@sensor_msgs/msg/Image@ignition.msgs.Image
Issues Facing
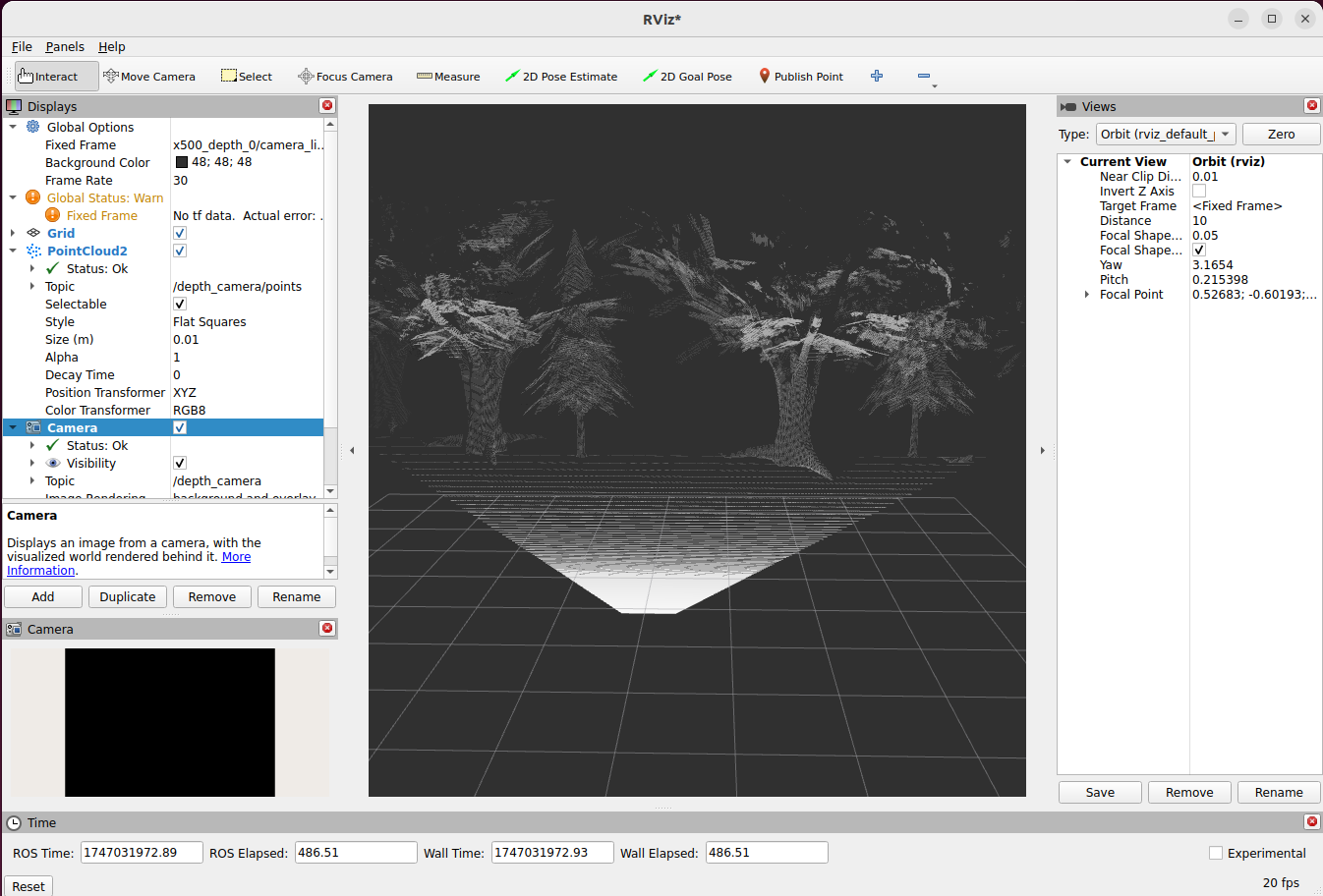
as, i am aiming to plot a point cloud from my depth camera’s data. or any type of mapping in rviz2, not able to receive any data except my camera’s image.
i even tried to look for my fixed frame by running commands for my setup (which is currently set to ‘map’.
ros2 run tf2_tools view_frames
which is returning me a pdf file which is stating No tf data received
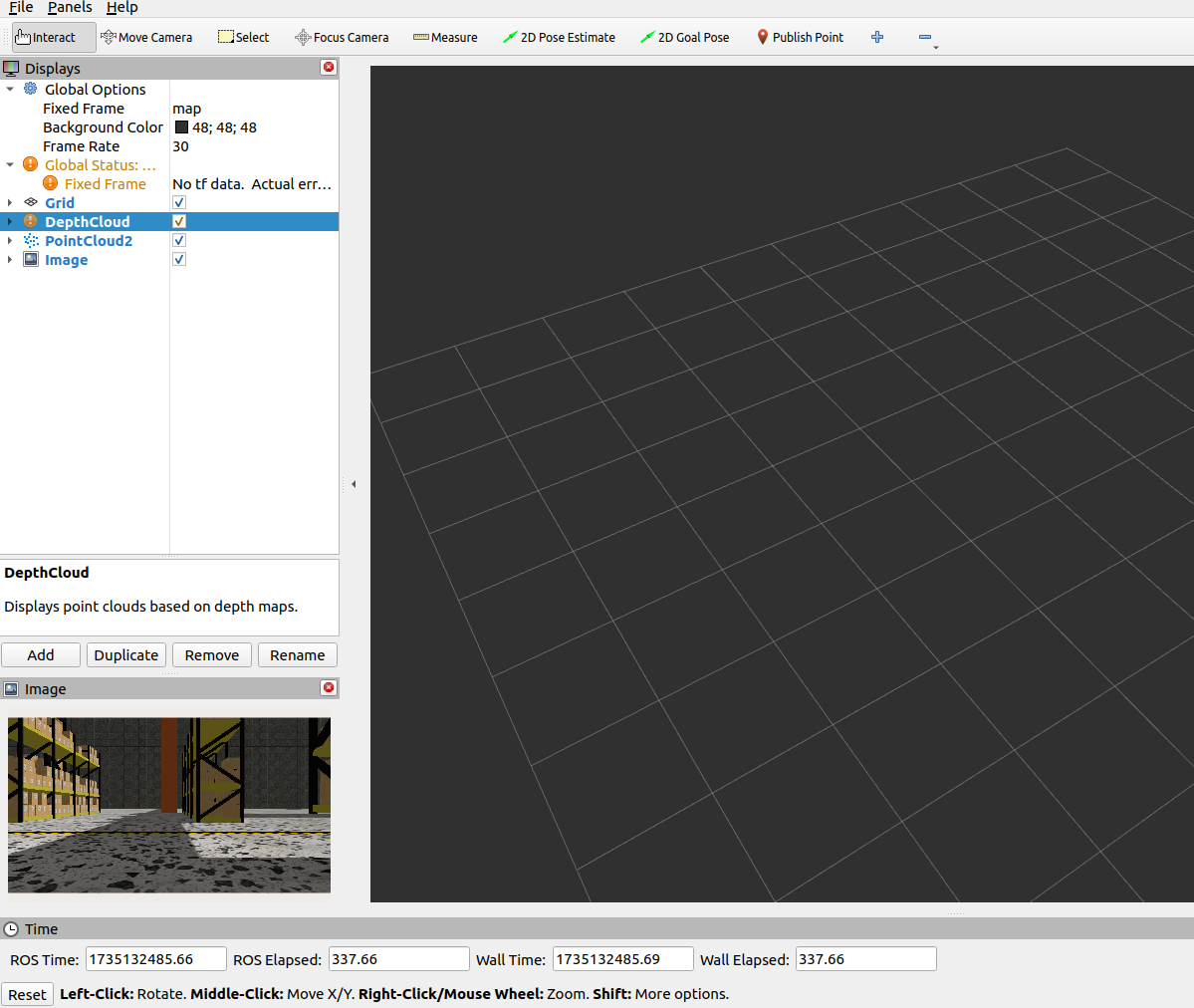
DepthCloud -Warning
Message
Expected topic type of ‘sensor_msgs/msg/Image’, saw topic type ‘sensor_msgs/msg/Image’
PointCloud2 - status ok but, nothing is being visualised
Image - status ok and, you can see in screenshot that image is being displayed in image Window below display section. it is from topic /camera
Error at terminal
I am also encountering an error on terminal when i am running depth camera
[INFO] [1735132258.527217640] [rviz]: Message Filter dropping message: frame 'x500_depth_0/OakD-Lite/base_link/IMX214' at time 368.512 for reason 'discarding message because the queue is full'
Kindly help or guide me how can i rectify errors or achieve my goal.