I successfully catkin build and run roslaunch px4 mavros_posix_sitl.launch
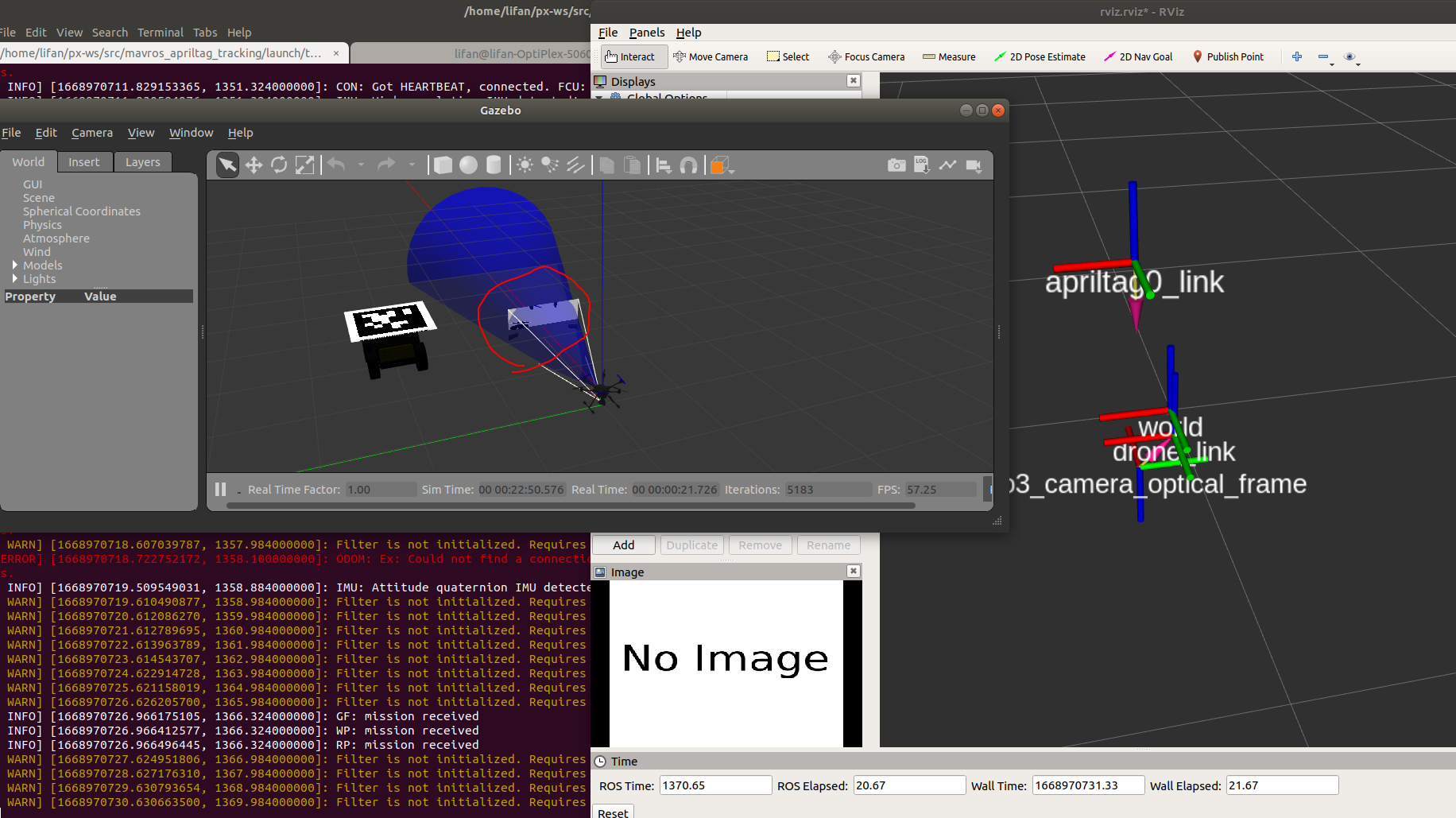
However, when I rostopic echo /mavros/camera/image_captured
There is no image.
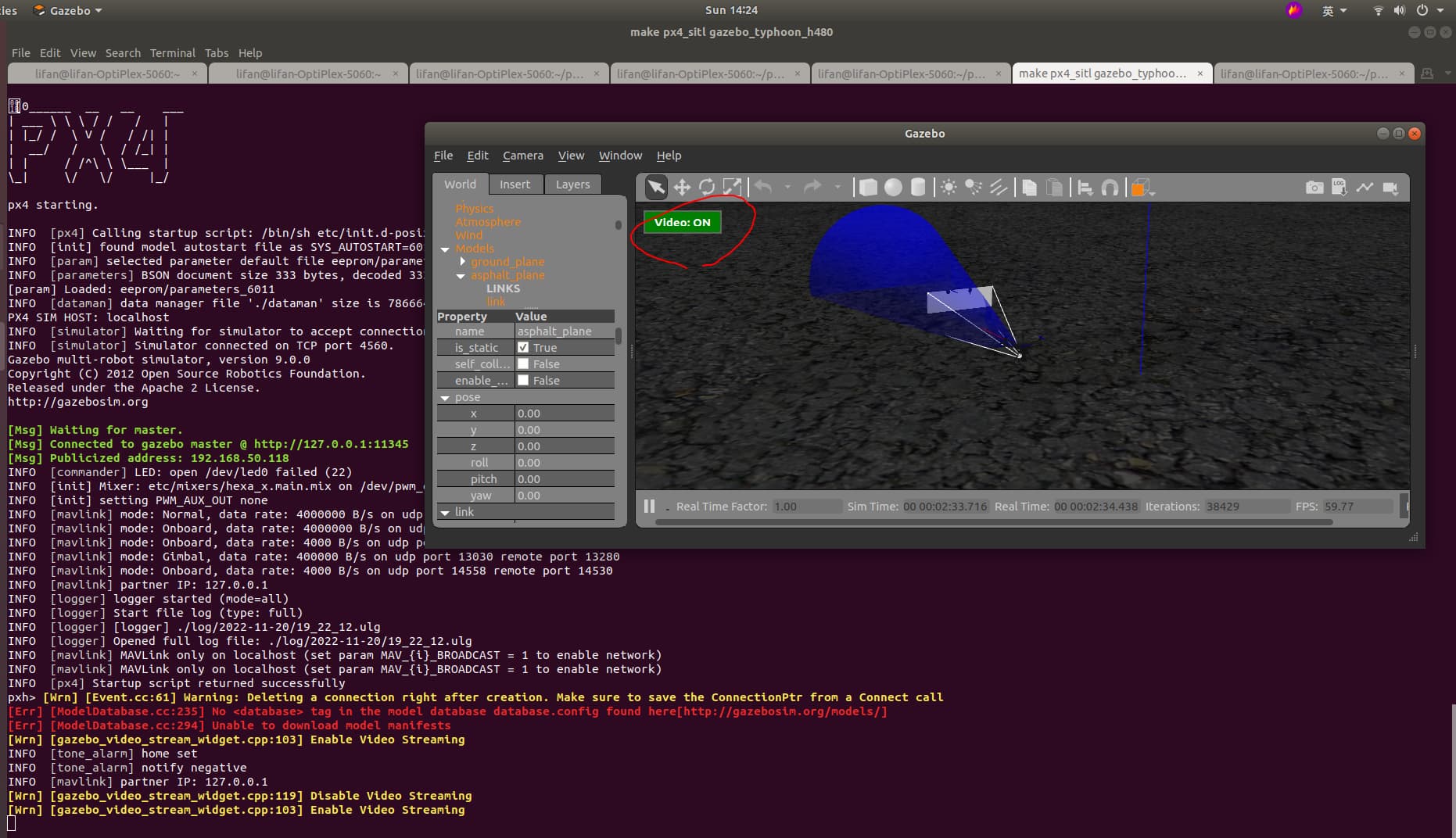
However, there is video in gazebo simulation
Thank you very much for the help
I successfully catkin build and run roslaunch px4 mavros_posix_sitl.launch
However, when I rostopic echo /mavros/camera/image_captured
There is no image.
However, there is video in gazebo simulation
Thank you very much for the help
@AlexWUrobot I think what you see is not the image, but the video stream of the camera being rendered. Are you sure you have taken an image on the vehicle?
Thank you very much for the reply.
I want to track a QRcode and land on a marker, like this GitHub - mzahana/mavros_apriltag_tracking: This package implements methods to enable a PX4-powered multi-rotor to track a moving vehicle.
However, the /mavros/camera/image_captured, does not publish ,
I also try to use the command
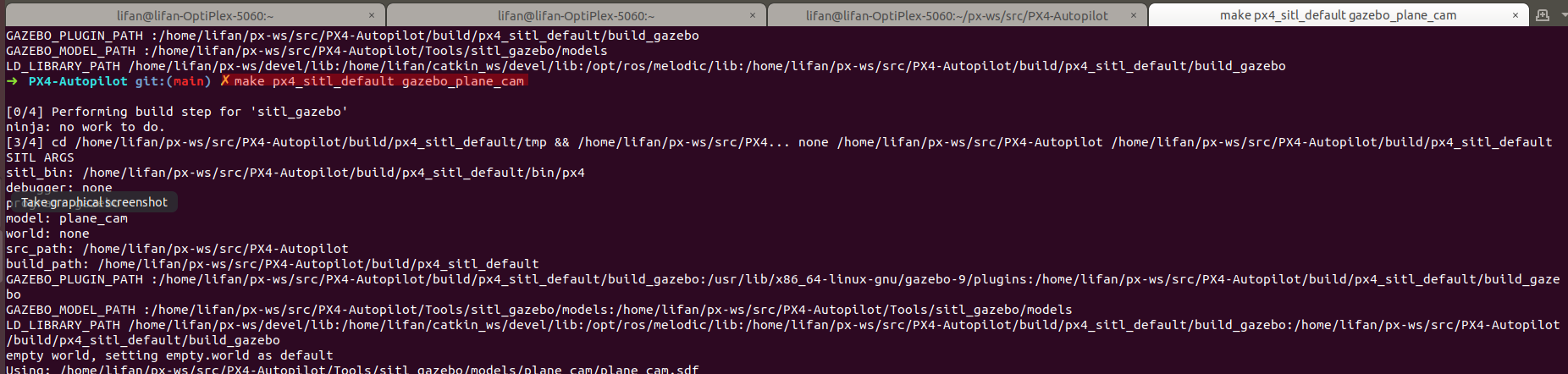
make px4_sitl_default gazebo_plane_cam
according to this link: Gazebo Simulation | PX4 User Guide
However, it will generate error like this:
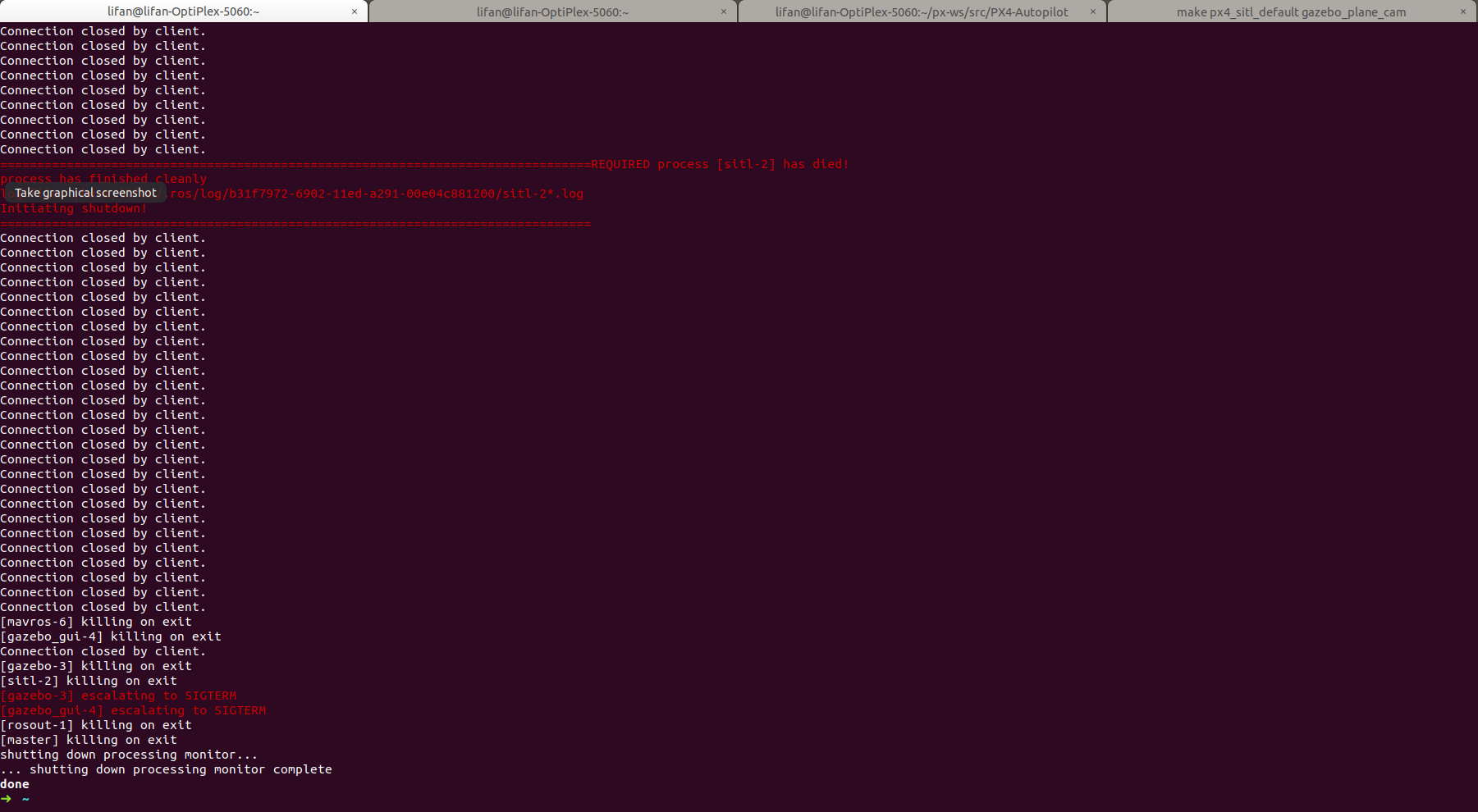
It looks like that make px4_sitl_default gazebo_plane_cam interrupt the roslaunch px4 mavros_posix_sitl.launch
Because the terminal where roslaunch px4 mavros_posix_sitl.launch ran stops suddenly, when px4_sitl_default gazebo_plane_cam ran in another terminal.
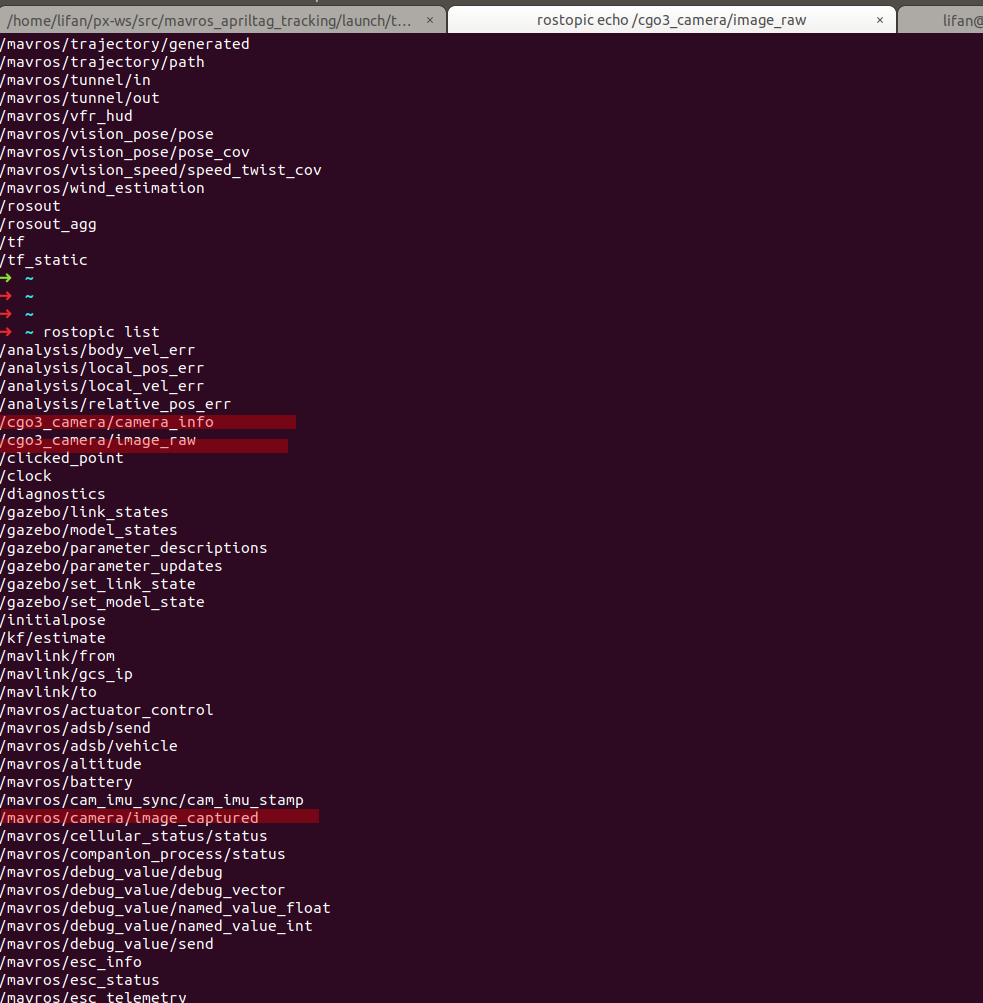
I also try another way, by adding one more camera, according to : GitHub - mzahana/mavros_apriltag_tracking: This package implements methods to enable a PX4-powered multi-rotor to track a moving vehicle.
However, the new camera /cgo3_camera/image_raw still does not publish anything
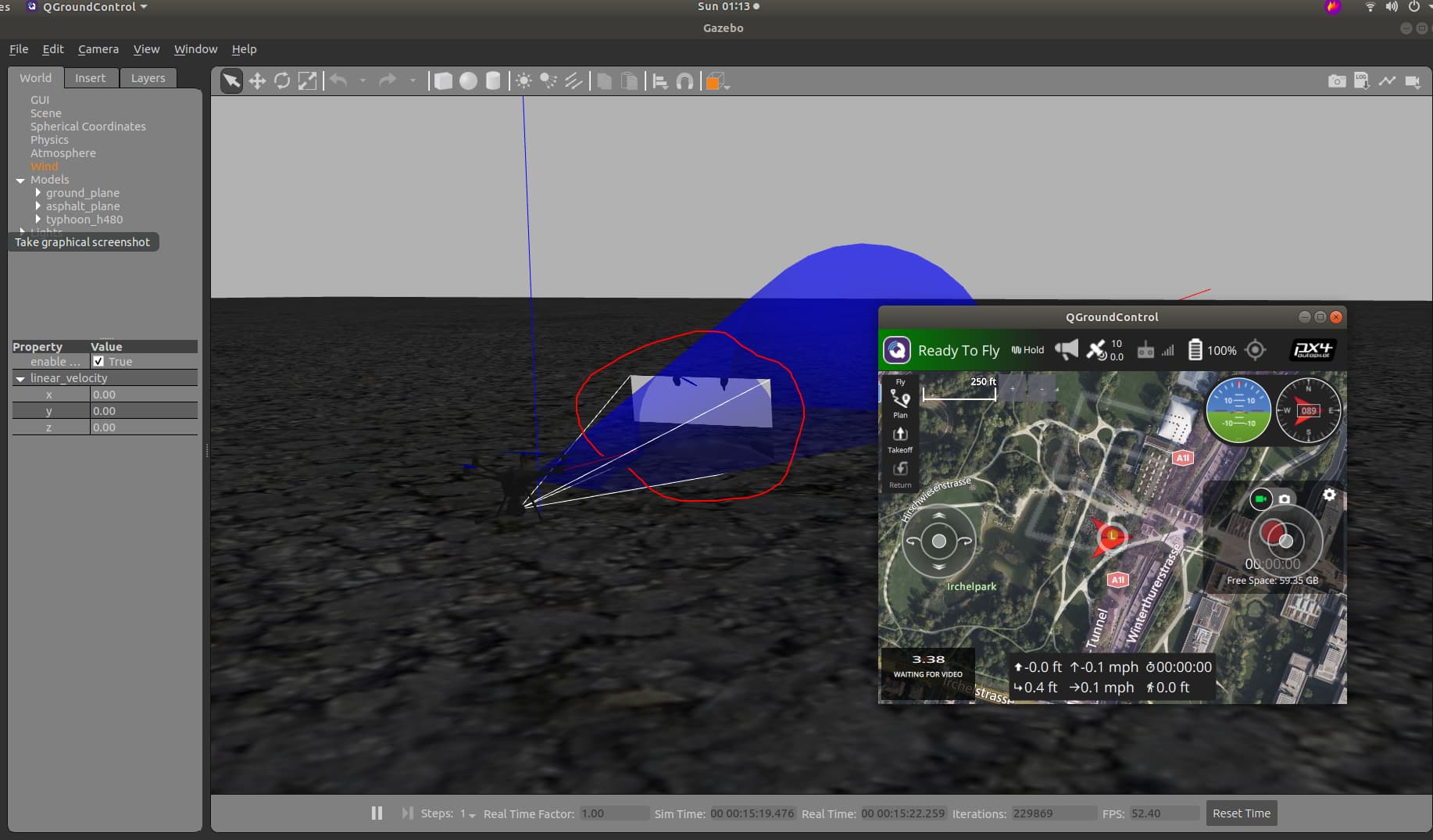
However, you can find there is a car in my simulation video, when run roslaunch mavros_apriltag_tracking tracker.launch
I also try make px4_sitl gazebo_typhoon_h480, according to Gazebo Simulation | PX4 User Guide
Thanks a lot again for your help and reply. Happy thanksgiving ^^
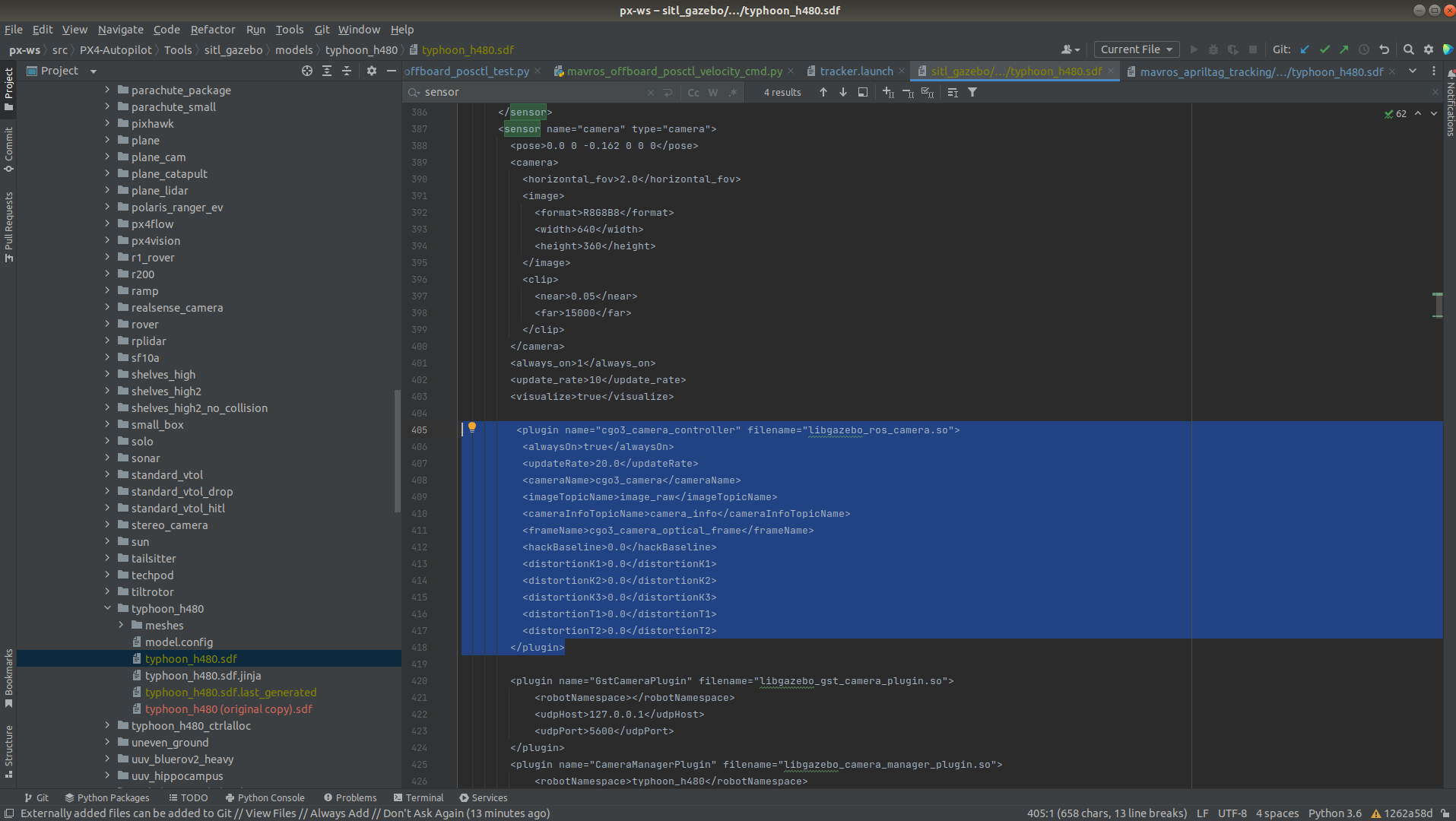
I find a work around by adding one camera in the file typhoon_h480.sdf directory: /home/user_name/px-ws/src/PX4-Autopilot/Tools/sitl_gazebo/models/typhoon_h480
<plugin name="cgo3_camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>20.0</updateRate>
<cameraName>cgo3_camera</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>cgo3_camera_optical_frame</frameName>
<hackBaseline>0.0</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
reference IRIS:
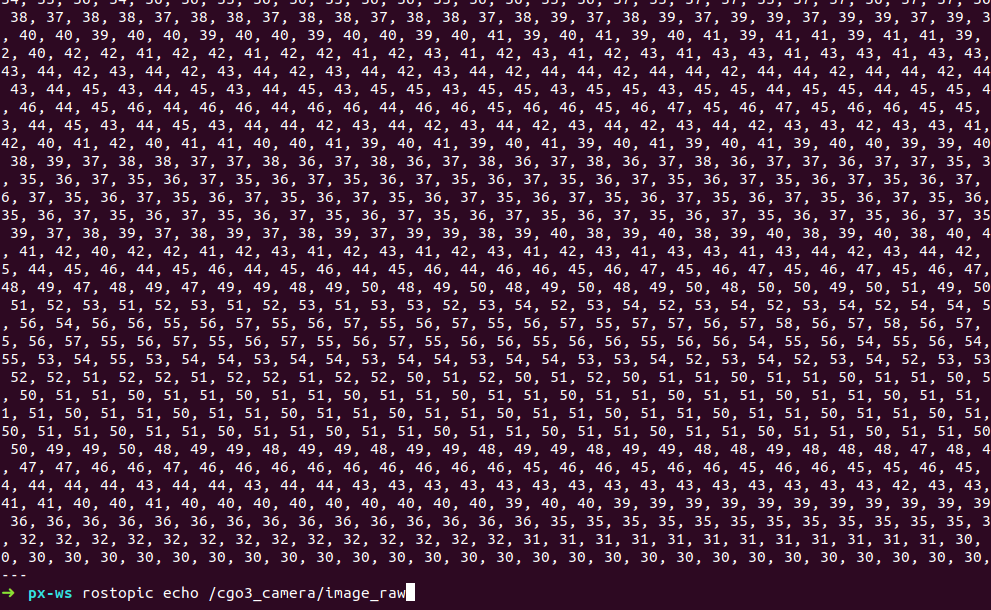
Then I can get the camera data by
In the first terminal:
cd px-ws/
roslaunch px4 mavros_posix_sitl.launch
In the second terminal:
rostopic echo /cgo3_camera/image_raw
In the third camera:
rqt_image_view