Using PX4 autopilot-development mode.
Was trying to get the camera feed into ros2 jazzy, running gazebo harmonic.
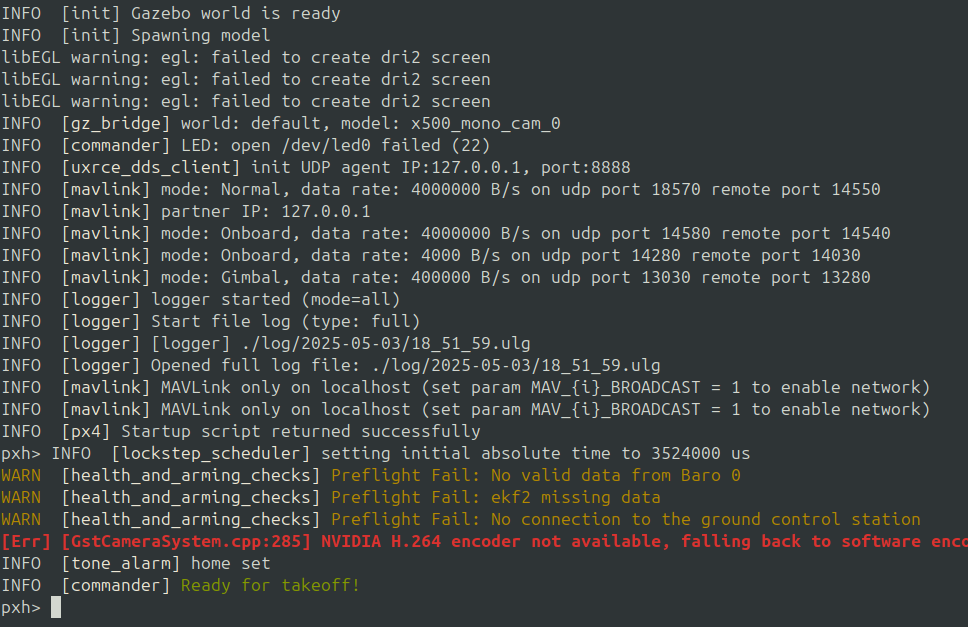
I tried everything, read all topics based on this and found no solution. The topic is being created but no data is being publisehd.
Ubuntu 24.04
attaching the make log. Please do help .