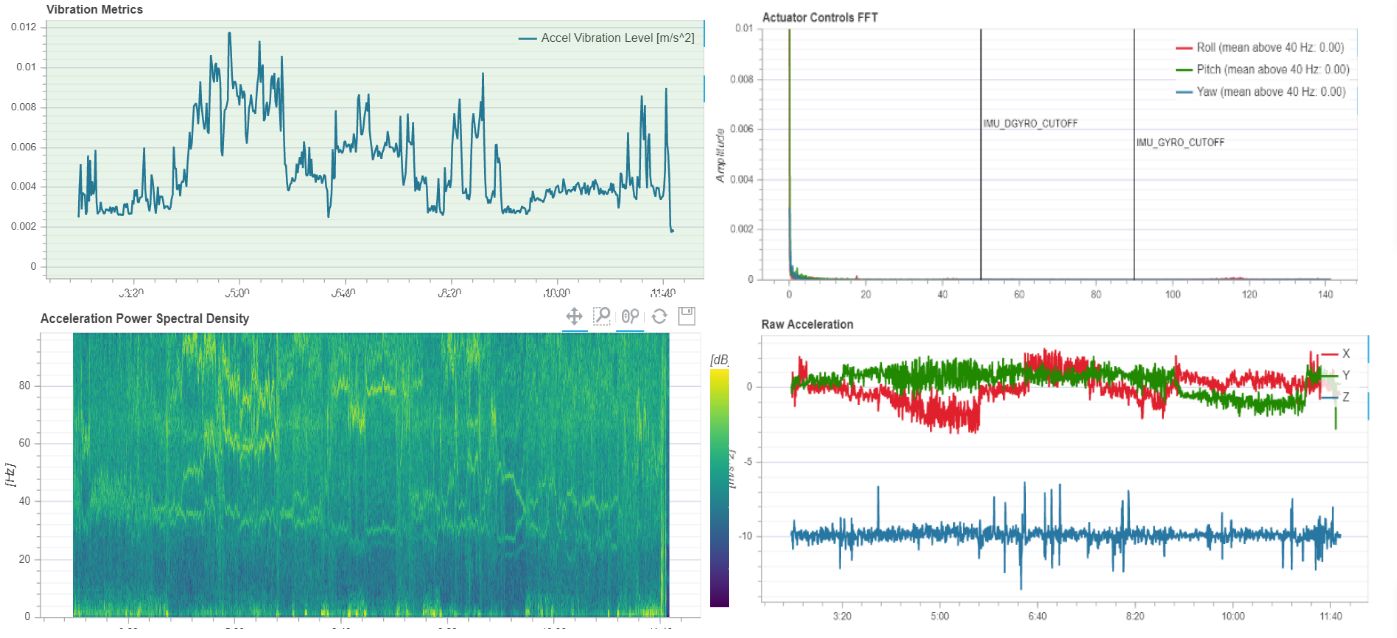
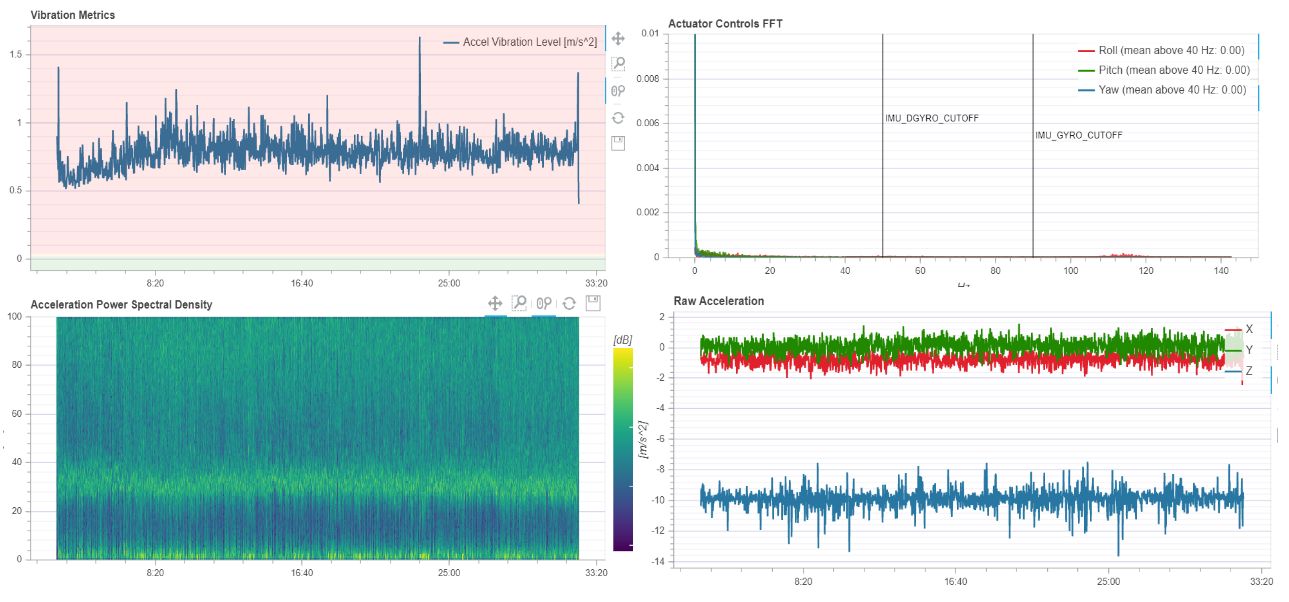
I’m trying to make sense of Vibration metrics in the Log Analysis tool. I have two frames that I’m testing. Both have identical electronics but differ in FC mounting and arms design. In the first pic, you can see almost perfect vibration metrics. However, in the second one, vibration metrics are all in red, however, the power spectral density, raw acceleration, and actuator controls are almost identical and looking great for both frames. So what makes vibration metrics so bad in the second frame?
Hi, the vibration metric includes the vibrations at high frequencies, higher that what you can see in the accel PSD plot.
Hi @bresch,
I am trying to compare the VIBE parameter of Ardupilot and Vibration Metric of Px4. For Ardupilot, VIBE is the standard deviation of raw accel values.
- For Px4, how the vibration metric is calculated?
- That is the usual safe range here? (Like, For Ardupilot below 30m/s^2 is good).
The vibration metric is defined here: PX4-Autopilot/VehicleIMU.cpp at fe80e7aa468a50bec6b035d0e8e4e37e516c84ff · PX4/PX4-Autopilot · GitHub
But If you want to compare with the standard deviation given by APM, the best is to use the same metric. We also compute the accelerometer variance (i.e.: (standard deviation)^2), you can then use that one (vehicle_imu_status.var_accel[.]).
1 Like