Hi all,
I seem to have come across a weird problem with my coax octo running Pixhawk / PX4 1.8.0.
During some tuning flights, I noticed the attitude response would sometimes become sluggish, oscillatory and unpredictable. This would only happen after approx 30 seconds of flight with pitch and roll inputs of 15 degrees.
This behavior now happens immediately, i.e, I can barely take off due to lack of controllability.
Flight logs show this is likely due to gyro / acc noise which has appeared suddenly. The Pixhawk is mounted using the 3M foam pads which come with it and this has worked well since it was built.
Things I have tried without success:
- Reverting to initial gains known to work well
- Swapping to another Pixhawk
- Checking for any wires etc touching the FCU
I have attached 3 log files:
- Flight with normal behavior before problems
https://logs.px4.io/plot_app?log=0497461d-018a-45f6-87b1-4c26d9b16a28
- Flights with problems appearing mid-flight
https://logs.px4.io/plot_app?log=b1323c3f-fa81-45f3-a7e9-dd19efa3b35f
https://logs.px4.io/plot_app?log=a33f2b7e-3164-403b-bf70-0be13c91300b
- Flight with problems from the start
https://logs.px4.io/plot_app?log=da5424a7-abb1-491c-8480-e5eda334f927
Any suggestions would be appreciated!
Thanks for.posting the logs. I will check if this is related to the change of the digital low pass frequency of the imu which was changed from 42 to 94 Hz.
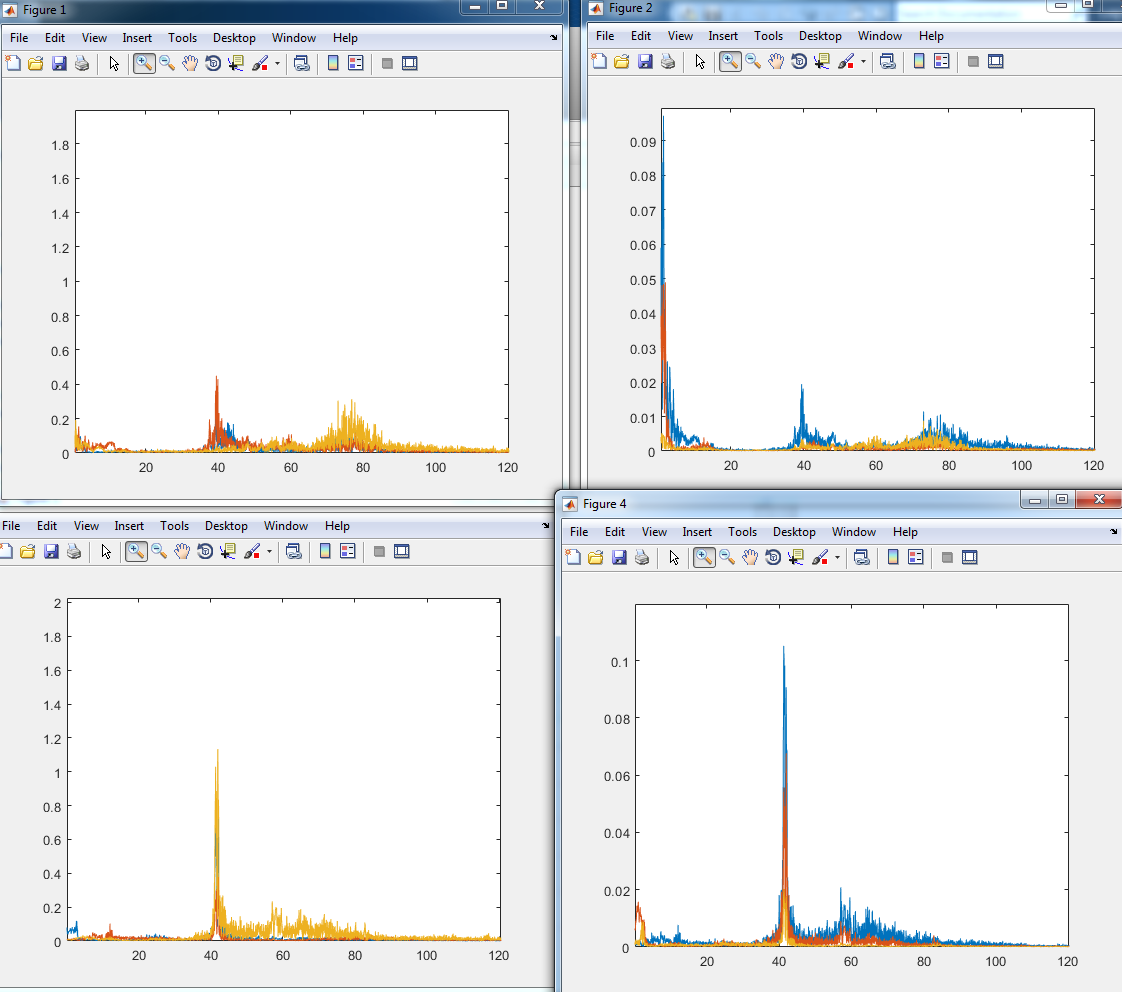
Hi tumbili, I’ve done the fft already, good flight at top and bad at bottom. Both with peaks at 42 Hz
Interesting. Previously we had the internal low pass set to around 42 Hz or so. Let me check the logs now.
Ok, and I also just realized that this is a flight with LPE. Maybe some of the LPE maintainers can have a look at this.
But in the log you clearly see a massive increase in vibrations at the end of the flight. To me this looks like something started vibrating.
Yup, that’s what is so odd. Nothing appears to be loose. I updated to 1.8.0 only during troubleshooting so perhaps that made it worse. I will pull the frame apart and check all the screws and report back, thanks alot.
Another thing, I had increased the rate p and d gains prior to these problems. Do you think esc or motor damage could be a possible cause? I have tried testing each individual motor with step pwms using the px4 app but there doesn’t seem to be anything strikingly different between motors.
Have you checked if your props are balanced?
Good idea, that would make a good start considering they’re 17"!
All seems to be resolved now. I suspect those high noise values were due to the drone-ground interaction since I didn’t have it airborne. If I leave it with partial thrust, the noise causes sudden oscillations once it becomes airborne but these dissipate over time.
However, it still doesn’t explain the log where it suddenly starts becoming sluggish and oscillatory mid-flight. I have decreased the D gains as a precaution.
Cheers
Another update, after reflashing v1.8.0 the drone became unflyable again. So I’ve gone back to 1.7.4 with no issues. Maybe you were right about the revised LPF frequency
Could you share this log please?
I won’t have access to the logs until next week, however I have updated to the latest master commit and this works fine. It’s just the 1.8.0 release which has problems.
Hi again, here is another log example where it becomes erratic mid-flight (with latest firmware)
https://logs.px4.io/plot_app?log=5fdf7626-eb45-4c15-aca6-eb6941349cee
Is there any way to check which axis causes these actuator saturations in the logs?
Cheers
@dejamzo Sorry for the late reply here. I really looks like something is starting to vibrate mid-air. The spectrum plot shows that there is a high frequency component at 40Hz which could be structural vibration. I once has a similar issue with a 650 size quadrotor where the landing gear was not stiff enough and started causing these issues.
But if you really see a deterministic difference between 1.8 and 1.7 then we have to follow up on this.