[quote]
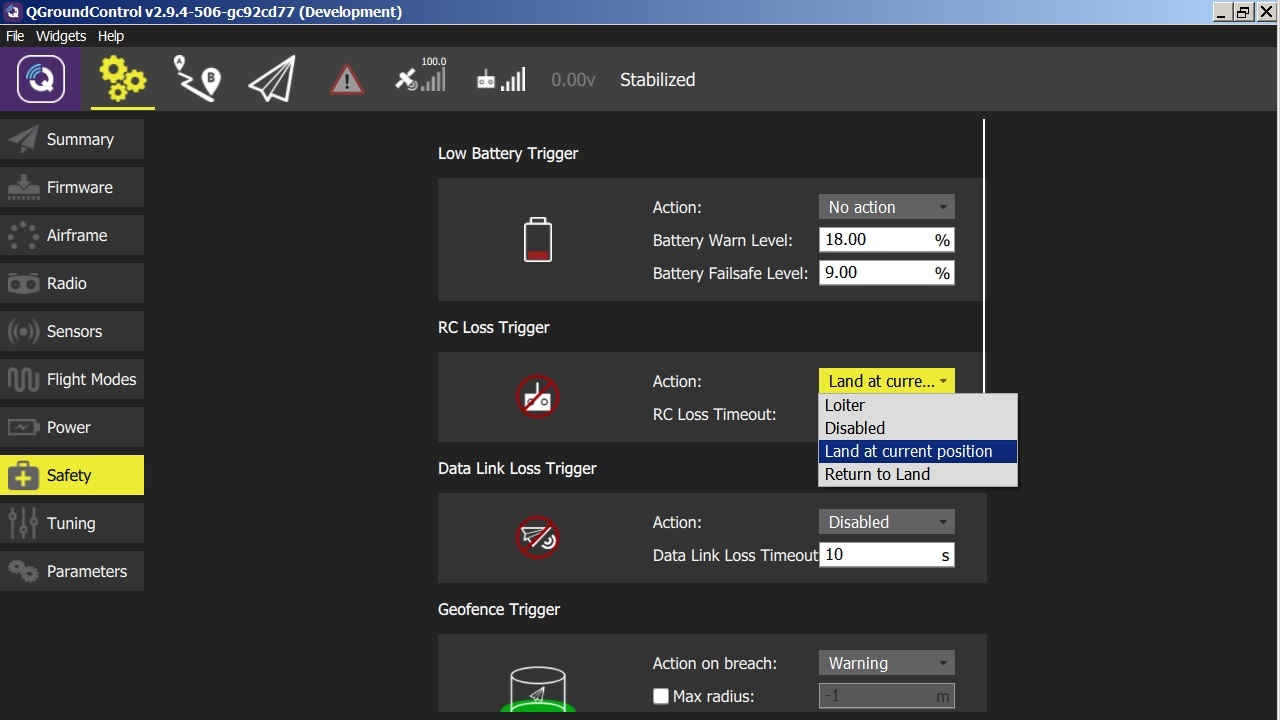
- @value 0 Disabled
- @value 1 Loiter
- @value 2 Return to Land
- @value 3 Land at current position
- @value 4 Outback Challenge (OBC) rules *[/quote]
Thx a lot, appreciate those FS options as well as the coming up battery FS, I even forgot about.
[quote]
Thx a lot, appreciate those FS options as well as the coming up battery FS, I even forgot about.
Update Issues:
1: Edit , wrong, older version
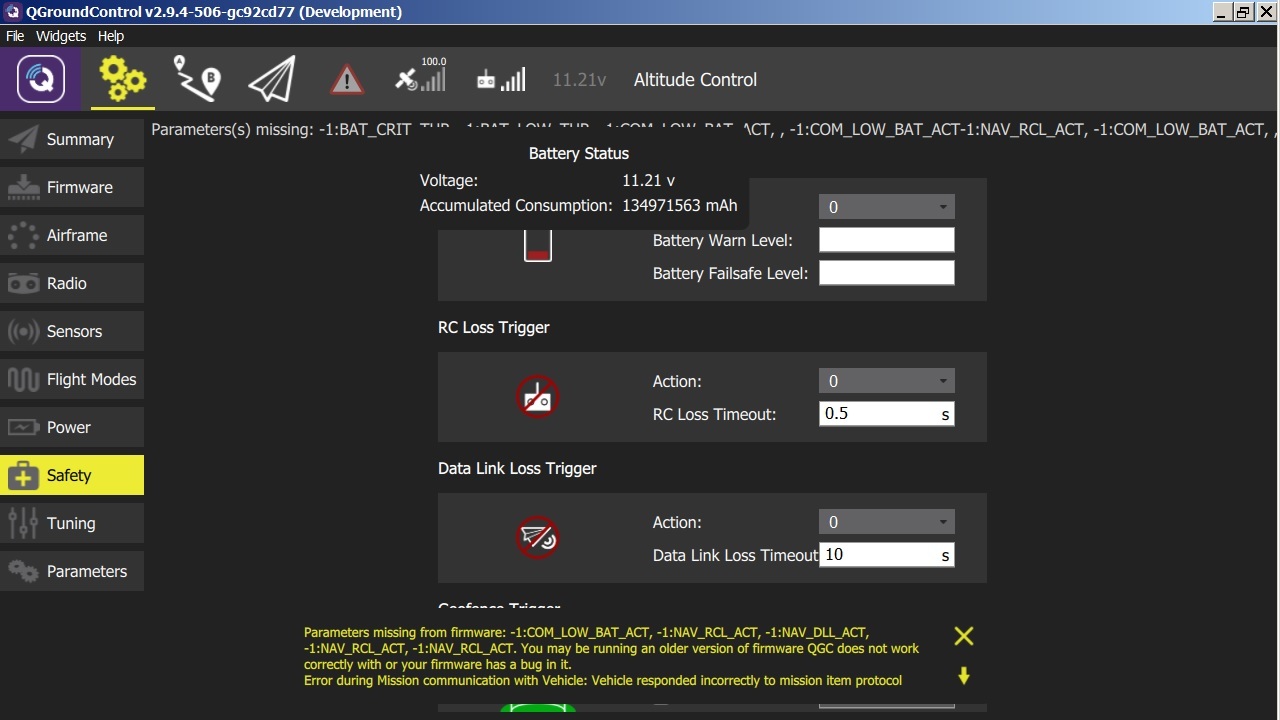
2.Parameters aren´t complete, some are missing (no matter if Android QGC or Win7) I would care less, but the related Warning messages are covering part of the screen during flight. (After connection loss and re-gaining)
3.Battery warning (or another annoying alarm) appears by chance if supply is done by USB, which wasn´t the case before. Not always but often. Annoying. Accumulated consumption still shows obvious nonsense (ACSP5)
4.New Failsafe option page including Bat. looks awesome, but isn´t assignable yet. (Understand its in progress) Btw. Its not scrollable @my 5" phone.(Other stuff is,which is great)
Edited former version !
Issues from above with QGC daily, recent Master, both installed an hour ago. Pixracer/F450/Win7/Android @ 5" (My usual test config)
You need to use current QGC daily and current PX4 master for this to work.
My english is too bad. Thought recent is current As I wrote, I updated both one hour ago. The “outdated” warning appears anyhow since a couple of days.
PS: Shame on me. Did another update. I must have indeed accidentally used an older version.
Other issues remain, accumulated consumption erratic numbers are back again.
Got it. Let me fix that.
Ok, issue found and fixed. Let me know if it behaves if you re-flash PX4 master now.
Thx ! Incredible fast fixes. I´m delighted.
Still have to check the Throttle FS settings of my TX (not PX4 related), because PX4 is recognizing PWM raise (instead of drop), when I turn the TX off.
Accumulated Consumption erratic values are gone as well.
Remaining question is the RC RSSi Status, which keeps telling me 100% even if the Tx is turned off.
2 proposals:
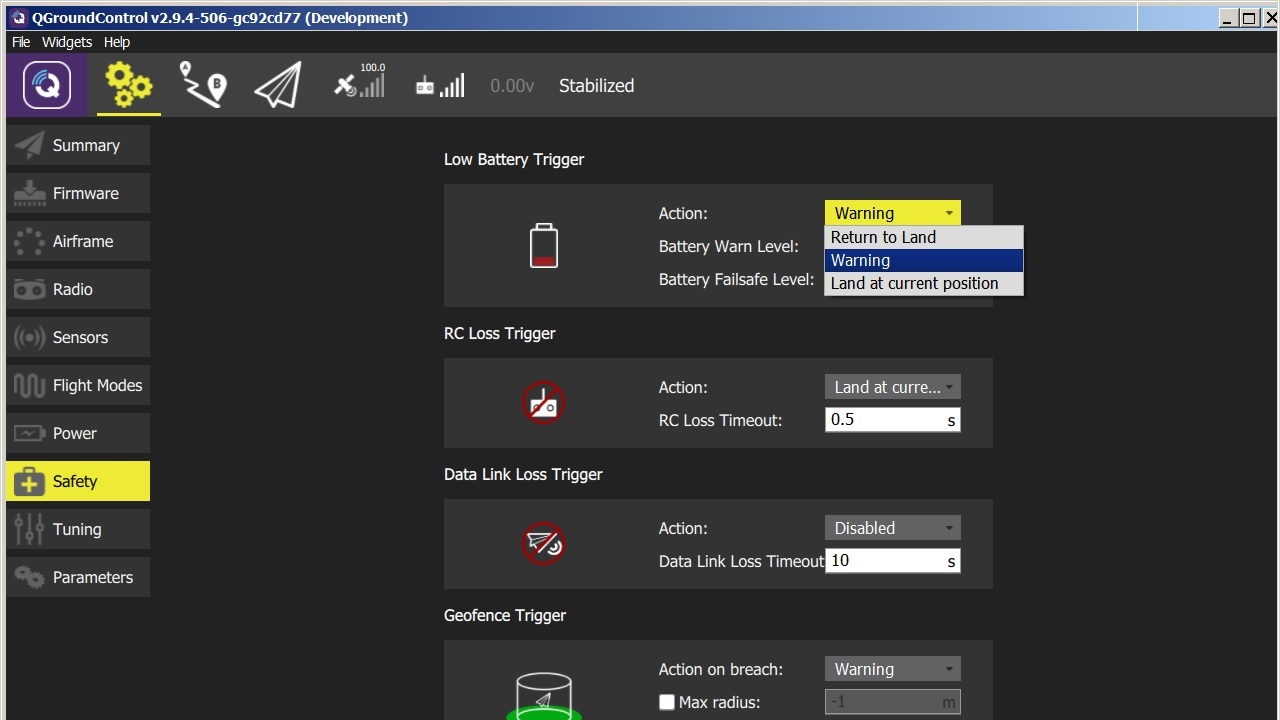
1 Low battery is only offering RTL or No Action.
As often accidentally experienced by beginners, RTL action is sometimes critical @ low battery,
so there should be the options Warn and LAND @ current location as well.
2 Turn off low battery warning, when vehicle is connected on USB. Sometimes I´m playing with PX4 in my office and its waking up all my c. , until I connect a battery.
Done, both is now on master and available in a few minutes. Testing would be appreciated.
Is there much left that needs to be tested on 1.3 beta and if not when is it planned released?
This is achieved now, thx ! Battery FS options are still No Action and RTL
@gervais QGC will only get new meta data if you flash PX4 through it.
@gervais
How can you tel that? No PWM values are shown in px4, or do I miss something?
Tested today with current GQC and PX4 Master Build. I noted the following issues:
 At least not random Values anymore.
At least not random Values anymore.Still there are many improvements I like just a few things above have some impact on my general trust in the Stack as it sometimes behaves a bit erratic.
Radio page,Channel monitor, where you can see the dots moving. This is not exact, but you see what happens.
Would be nice to have a PWM values preview on “Radio” page for each main PWM channel (1-4).
Thanks Andreas!
The main reason your experience with this is different that you moved from being a normal user who flies stuff that has gone through several testing cycles to the frontline.
The upside is that you’ve helped to identify a number of issues, and I’ve fixed them already:
It would be great if you could test the next QGC daily build on the weekend with current master. It might still have rough edges but the things you found here should be addressed.
Yes this would be ideal
I just pushed an improvement of the land detector to master. More test flights would be great, we seem to be really close to be able to call it done now.