And I almost forgot: Significant improvements to the battery estimation. If you set the voltage drops per cell now correctly you should get a pretty stable estimate across your full throttle range.
@LorenzMeier is the master build QGC 1.3 or the beta build that we need to test?
I am just slightly confused because in the very first post it was stated to use the beta build. I assumed that was 1.3 but if I need to change to the master build please let me know.
My apologies. Please use beta (will be updated in about 10 mins from now). I will try to be more concise and only ask for test updates when I’ve updated beta. Thank you for raising this.
Thanks for the clarification. I will test it over the weekend and just to confirm I am still using the stable version of QGC and not the master build.
You need to use a daily build of QGC for the beta. Anything else will give you trouble.

qgc also freezes for a bit when i change the camera trigger setting and apply and restart in the camera tab. On windows the screen goes white but eventually works again and responds.
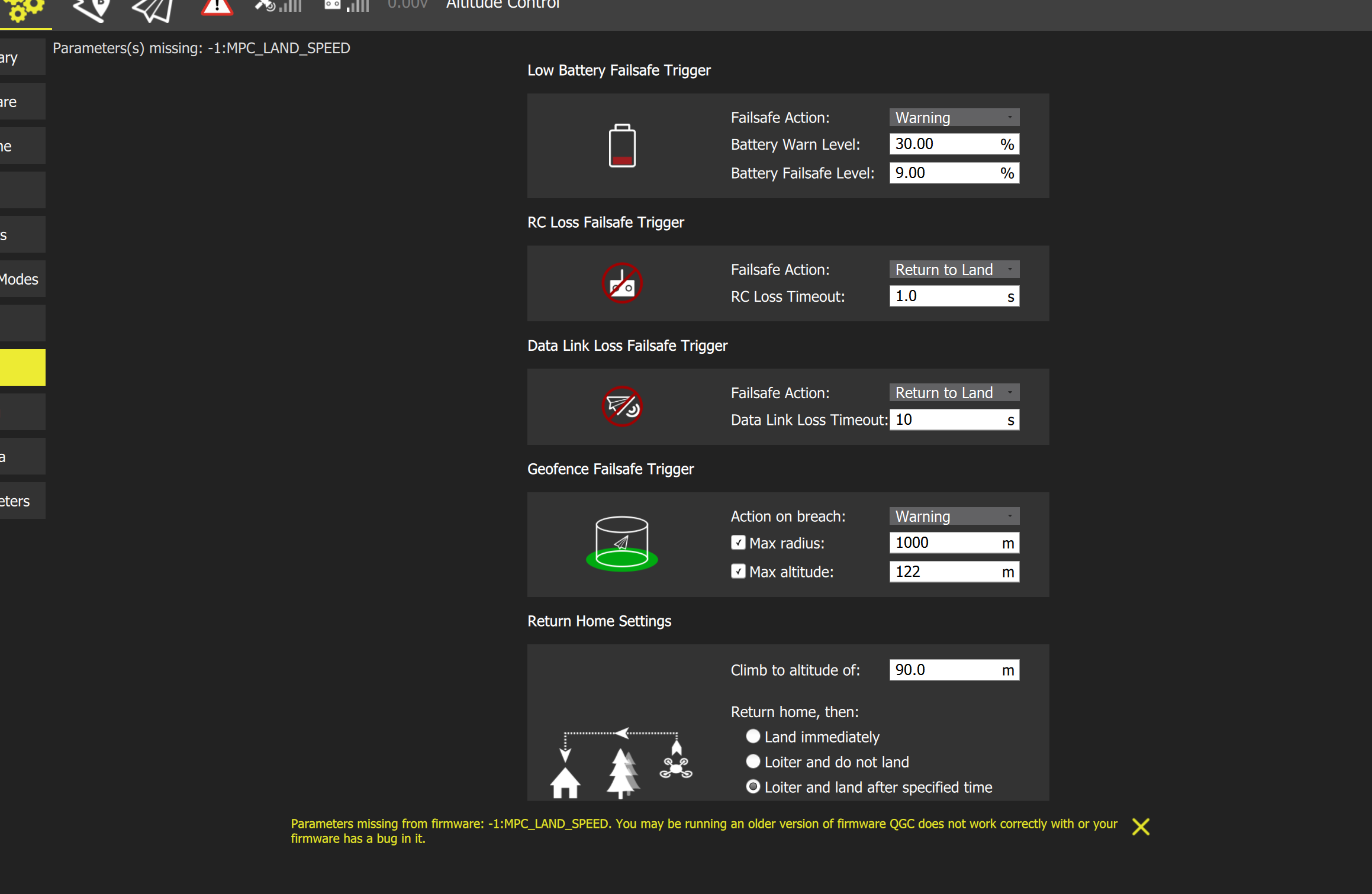
The summary issue is a layout issue with the summary controls. Based on the screen capture, it seems the control is too small or the font is too big. There are still quite a bit of cross-platform layout issues in QGC. Could you do me a favor and send a screen grab of the “Debug” panel (under “Preferences”)? That will help determining what your system thinks your screen density is. So far I have not been able to find a constant across platforms.
The missing “MPC_LAND_SPEED” means just that. QGC expects that parameter and it’s missing.
Lastly, when you change the camera trigger mode and hit “Apply”, it reboots the flight controller. QGC “should” show a disconnected state and reconnect automatically once the flight controller comes back online. If it’s showing a white screen on Windows, it’s a bug in the Windows version (which I have not tested at all).
I’ll get the screen shot for you. Is the missing parameter a big deal? The camera restart is definitely a bug. The layout issue may be because I am using a surface pro 4?
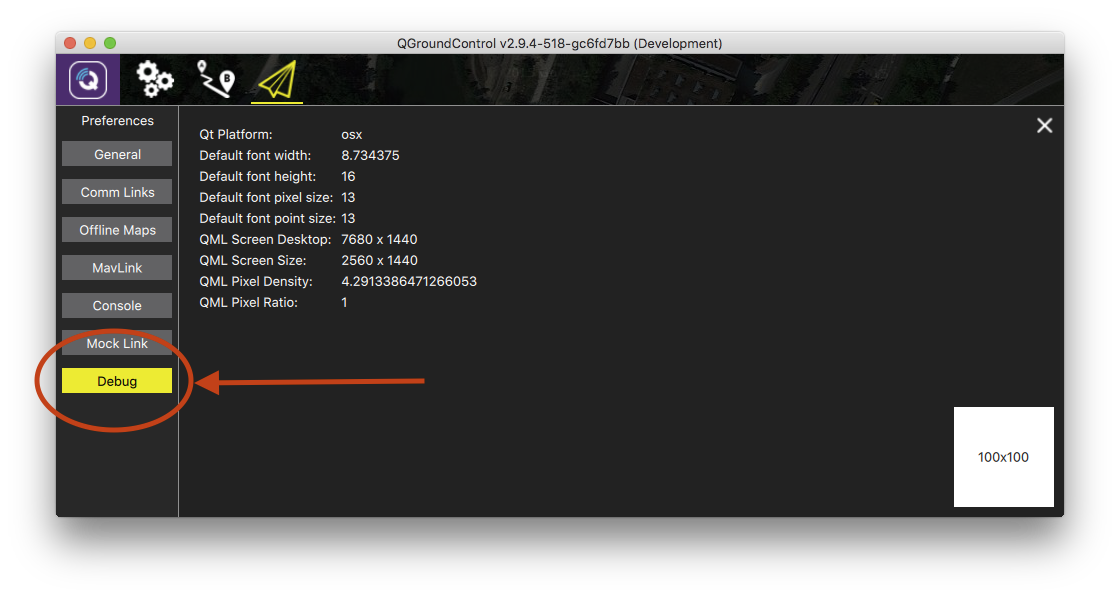
How do I get that tab. Mine stops at console
I don’t know what the scoop is with the missing MPC_LAND_SPEED parameter. @LorenzMeier would be able to answer that better than me.
Yes, I guess that computer of yours is under the “Tablet” category, which is where we really need to figure out a way to have it consistent across platforms ![]()
Oops… You need the debug version for that. I assumed you were building it yourself.
No I just have the daily builds. @dogmaphobic I can confirm the layout issue on a regular laptop with 1080p display as well…
In addition to the missing parameter I am finding sometimes my motor beeps when I power it on continuously and other times I only get 3 beeps.
Compass calibration is hanging up on one of the rotations randomly and I cannot calibrate the compass. I have made multiple attempts. It seems to have issues on a regular laptop but on a surface pro 4 you cannot calibrate at all.
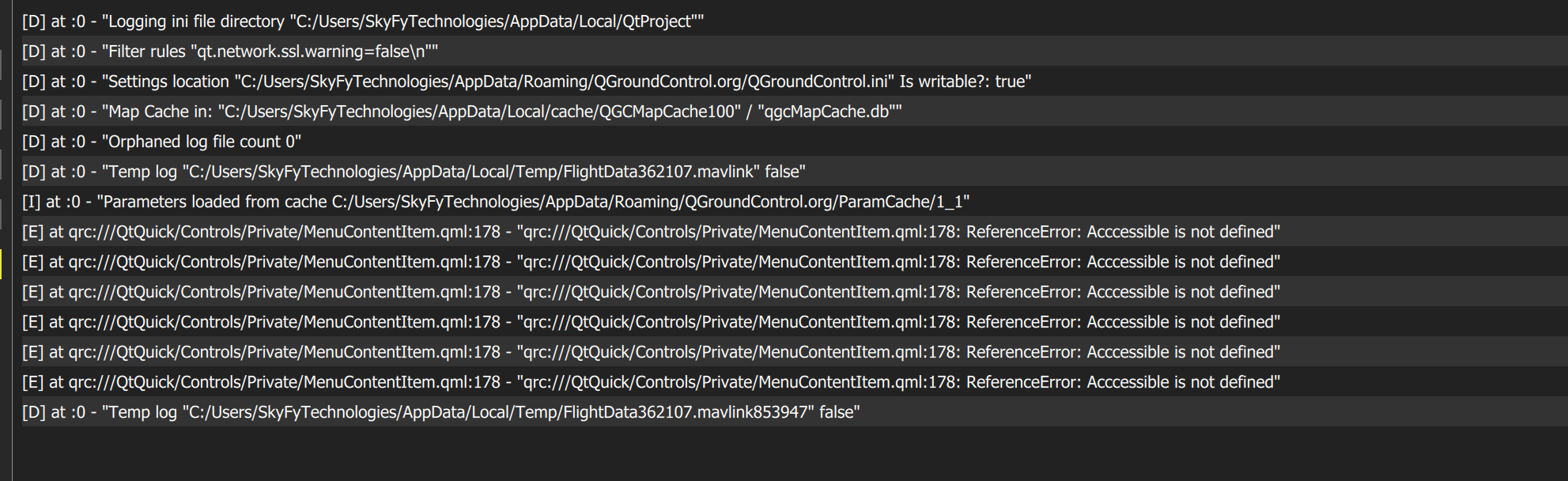
Do you have the console log it displays? Do you rotate the system once you have assumed one of the six positions or are you just holding it in that position?