I’m experiencing strange throttle response after updating my controller. In Altitude and Position modes, my full throttle range is “compressed” into the upper half of the physical joystick movement. After arming, motors spin on low revs until I’m about 75% up on the throttle stick. Then I can fly “normally” if I operate my throttle in the 50-100% range.
Flying manual mode is normal - as in throttle stick is functional in 0-100 range as expected. I am using DShot600. I have tried switching to control allocation just to test the GUI and then back. Can it be that some parameters persisted?
edit:
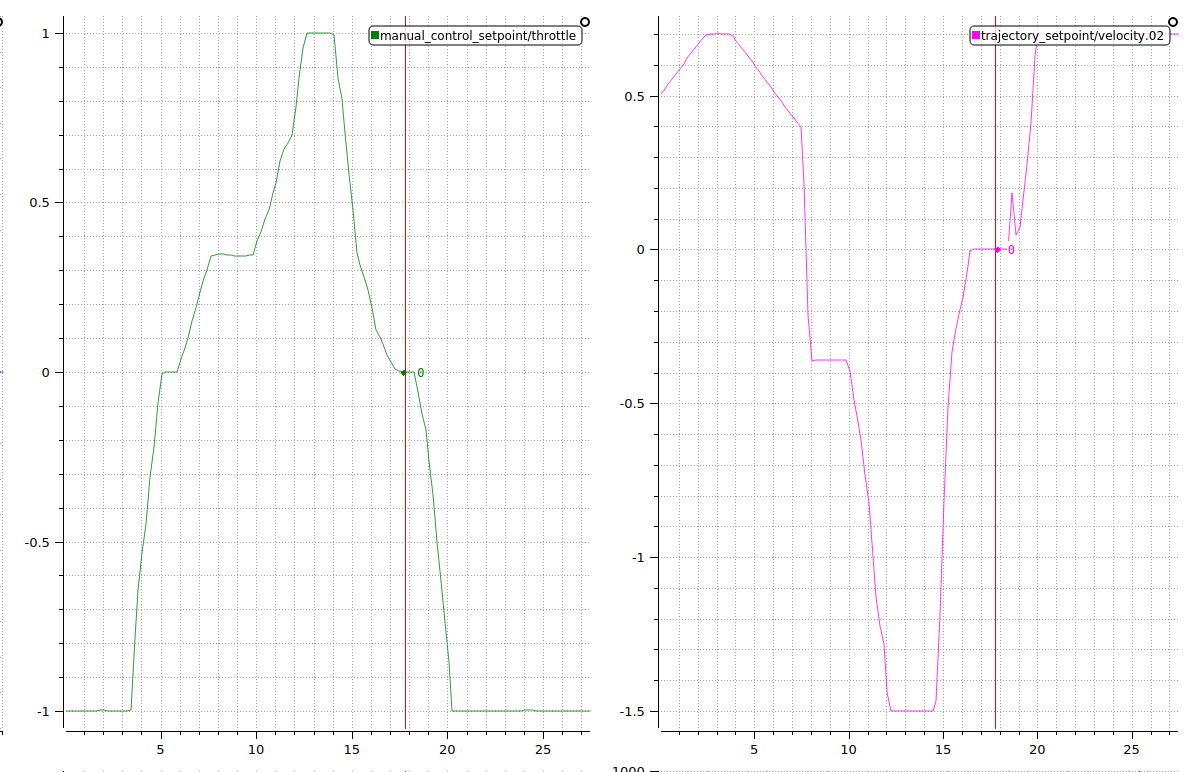
Log Review shows throttle as [-1;1] rather than [0; 1]:
I’m having the exact same problem with px4, v1.15.1, holybro x500 v2, flysky fs-i6x. Testing the motors in manual mode behaves as expected (0-100% range), but in altitude and position mode, the throttle is “compressed” to 50-100% throttle stick range.
How did you fix it? Which firmware did you reinstall? Any hints from anybody what exactly the problem could be?
edit: @sfuhrer how can I map throttle to [-1,1] in the mentioned modes?
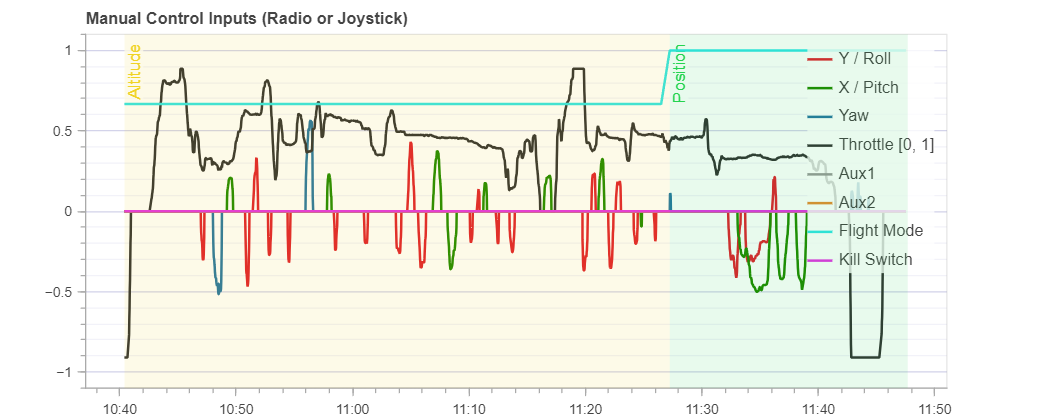
Yes, I recalibrated the RC and also the pixhawk from scratch. Still the same issue. In the logs the described behaviour can be seen, in manual mode the actuators start with increasing thrust immediately, in altitude mode the actuators start at 50% thrust.
On a first glance I don’t understand what’s wrong. In Manual/Stabilized/Acro modes the throttle stick maps directly to the throttle, so the stick in the middle results in 50% thrust. In Altitude/Position mode the throttle stick maps to height rate, so a stick deflection of 50% results in 0 height rate. Moving the stick above commands a climb and causes the motors to spin up.