Hello,
I’m using the PX4-Autopilot software and conducting flight tests with a custom-built quadcopter. The drone is equipped with GPS, optical flow, and a distance sensor, and I typically fly it in Position Mode using these sensors.
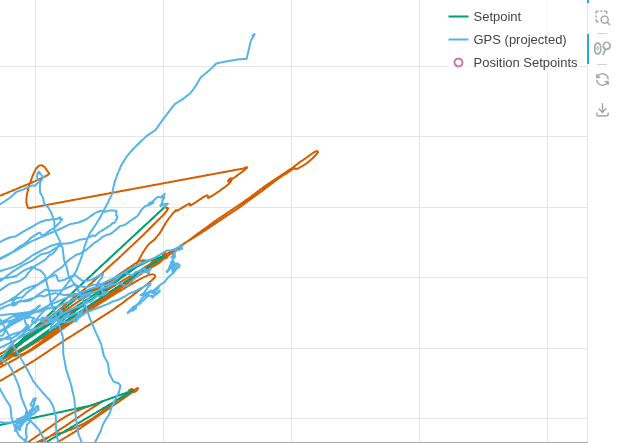
In my last flight, the drone flew smoothly for about 10 minutes, but during the final minute, it started behaving erratically. It moved uncontrollably and did not follow the setpoint I had given.
Upon reviewing the flight log, I noticed that RC inputs were correctly received and interpreted. However, instead of moving forward as commanded, the drone continued moving in the opposite (backward) direction. Additionally, even though I pulled the throttle down to -1, the drone did not decrease its altitude as expected.
Below are the technical details related to the drone and PX4 configuration. I would appreciate any help or insights regarding what might be causing this behavior.
Thank you in advance!
System Information:
- Firmware: PX4 Autopilot (v1.15.4)
- Motors: X-Rotor 3115 900kV
- Propellers: 10 inch
- PX4: Holybro Pixhawk 6C Mini