Hello everyone,
I’m running a flight test on a new build based on the pixhawk 4 mini. It’s the holybro qav 250 quadcopter.
I’m trying to understand why the drone don’t take off correctly. On the picture it appears it 's the motor 4 that don’t spin fast enough but on the logs plot the motor 3 has pretty much no output (but spins in reality).
Picture:

Full logs:
https://logs.px4.io/plot_app?log=47efd782-e73f-419a-af1c-4cc04a30db1c
The drone is positionned in the same orientation as in this schema (and motors/props spins in the very same direction)
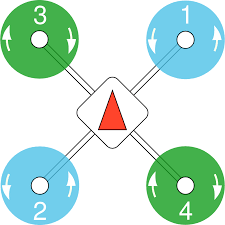
My guess is that px4 don’t detect that motor 3 spins correctly and increase the power, leading the drone to basculate.
On QGroundControl, all motors are correctly identified and answers equal powers (visually at least)