Dear all,
I use pixracer with the newest version stable firmware, but it turns out that the copter cannot be armed. When I use previous stable version, it can arm and work fine. I dig the source code and see the difference in commander.cpp, as follows:
arming_ret = arming_state_transition(&status,
&battery,
&safety,
vehicle_status_s::ARMING_STATE_ARMED,
&armed,
true /* fRunPreArmChecks */,
&mavlink_log_pub,
&status_flags,
avionics_power_rail_voltage,
can_arm_without_gps);
I saw that the last param, that is, can_arm_without_gps is a newly added one, which does not exist in previous versions. I fly without GPS, so I manually set this param to TRUE (it is FALSE initially in the source code), but the copter still cannot be armed. I cannot figure out why.
Please help me out. How can I arm the copter for pixracer. Thanks!
I will look into this end of this week if nobody else beats me to it.
I have the same problem (stable 1.4.4). Took me a long time searching for a reason, since the copter flew fine before.
With 1.4.4 I’m getting error messsages saying “push safety switch first” or “prearm checks not valid”.
These may not be the exact words, since I am not sitting in front of my copter, but text is very similar.
I am DISAPPOINTED, that this can happen in a stable version!
END OF THIS WEEK IS VERY LATE ! I CAN’T FLY!
BEAT, BEAT, BEAT YOU IN THE DIRECTION. 
Is there any progress for this issue?
I will be going back to 1.3.4 in the meantime.
Which file ist suited for the pixracer? V4 Version?
Yeap. However, I still intend to use the newest version. I can feel many bug fixes in comparison with the older version. I hope the arm issue could be resolved soon. @LorenzMeier
Done.
1.3.4 arms and flies fine.
I fear, development is on 1.5 now. Lets see, wether 1.4.4 gets still maintained at all.
We are flying 1.4.4 successfully here. There is not a single log file in this whole thread. Can you please share a log from when the system was armed?
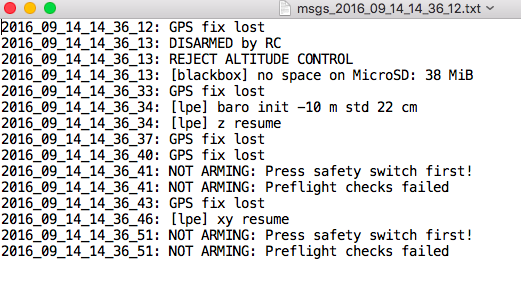
Can you share a screenshot of all QGroundControl messages when you try to arm?
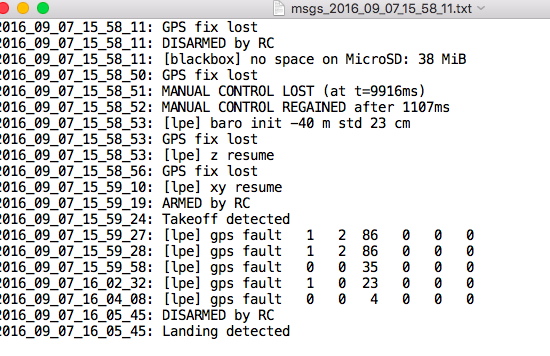
I had my last flight with older FW with a log file.
With 1.4.4 there is no log file. The system didn’t arm.
Just a messages file, which could reveal the QGroundcontrol messages.
Shown below is a file from 1.4.4 and an older one from the flight before.
Is there a new test in 1.4.4 concerning space on SD card?
It flew before with “PRE-1.4.4” and full SD card.
I’m now on 1.3.4.
Should I try to reflash to 1.4.4 and get screen shots?
Will there be a log file when arming fails?
If you do not run a racer config you either need to use the safety switch or disable it in the circuit breaker section (Cogwheel -> Parameters -> Circuit breaker -> set to max value).
Thanks. Will give this a try.
I’m using the pixracer board and the safety switch wasn’t used for this board in the FW before.
I didn’t find this in the release notes, but now I know where to set.
Which settings determine a “racer config”?
Dear Lorenz,
I use pixracer and use the newest stable firmware downloaded from qgc. I use airframe 3dr diy quad and cannot arm. I am sure of it! Maybe you can try with my configurations.
I am back on 1.4.4 and for me the circuit breaker for IO-safety did the trick, as Lorenz mentioned above.
Parameters -> Circuit breaker -> IO-safety -> set to max value.
I used the airframe “3dr diy quad” before and now am on “generic quad”. These only give presets for tuning and other parameters that can be changed individually later. Circuit breaker seems to be the only value one has to change for pre flight checks in order to arm.
Mine flies again 
Hello, I also cannt arm with the User’s Guide said “To arm the drone, put the throttle stick in the bottom right corner”. And now I have to arm by QGC but this is very trouble. Anyone know how to solve it? Or it can only arm with the Ground Station QGC?
Thank you ! by the way, my drone is VTOL TBS.