Hi,
I decided to try 1.5.2 Stable on my small quad and after calibration the motors don’t spin up at the same time, only two motors spin until I throttle up quite high.
Log is here:
http://logs.px4.io/plot_app?log=947e4bb4-84cc-42cf-a873-7a11ad0bed1f
Some other notes:
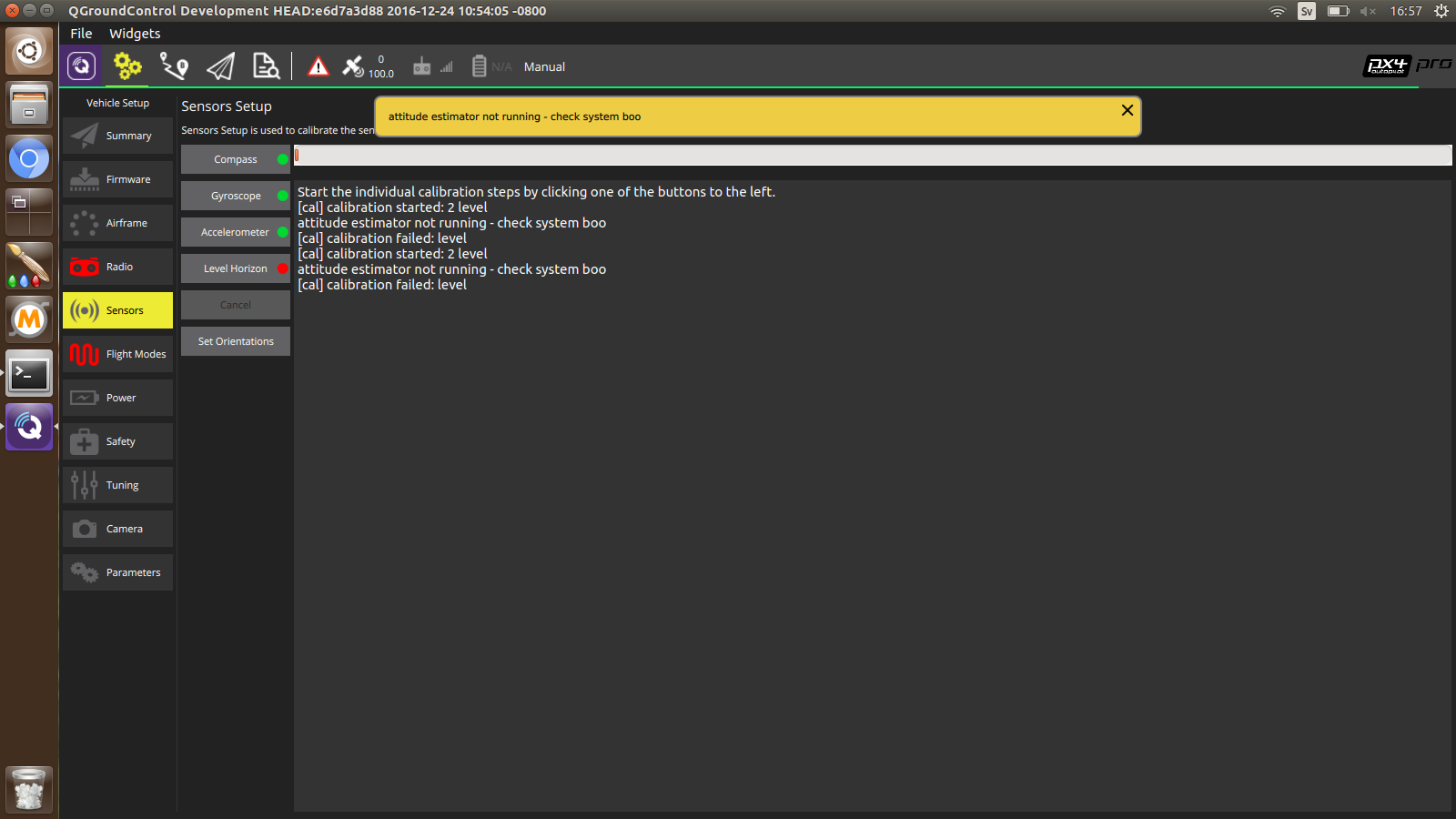
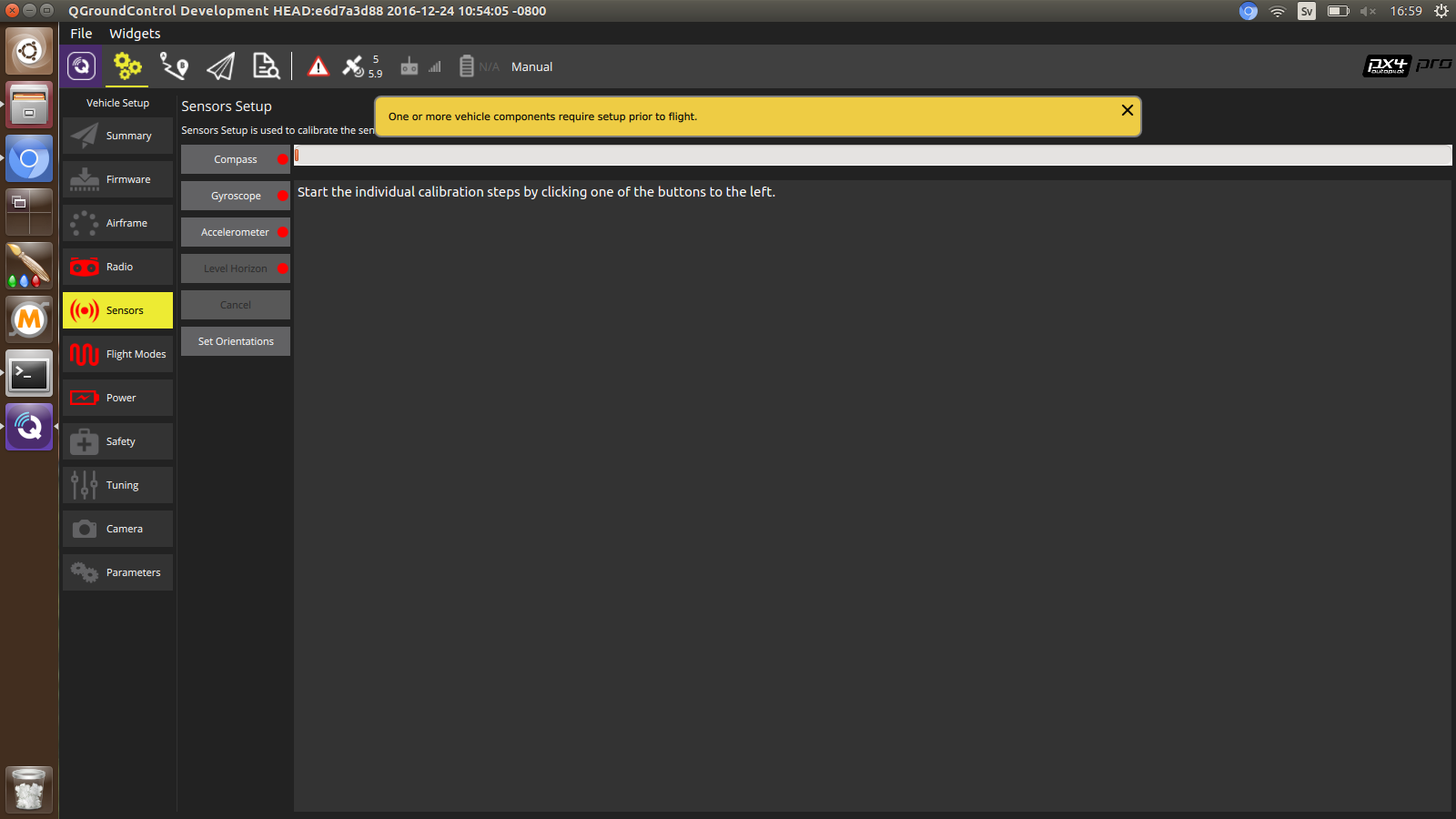
- Before I calibrated the sensors I got warning messages in QGC but the sensors were all green in the GUI.
- QGC constantly tells me that RC link is lost during calibration even though I don’t have an RC connected.
Thanks for any inputs!
Hi,
When locking at the logs it seems to me that the autopilot controls different pwm set points so the pwm_min parameter should not be the issue?
I also tried with ardupilot and it works good so I don’t think it is the esc calibration.
Thx
Try again with a completely flat setup and without any stick inputs. Your log shows that the roll / pitch set points are not at zero when you arm.
No, the PWM_MIN value is exactly your issue. You need to set a higher value for your ESCs.
Ok thanks will do.
Now I flashed 1.5.2, calibrated everything but was not able to level horizon:
When I re-powered all calibrations was lost
I redid the calibration and now It worked, however I can’t arm because I don’t have a safety switch plugged in. What is the parameter to disable the switch?
Its in the circuit breaker section. Is it possible that you didn’t choose a racer airframe but generic? If you had chosen a racer you would have also gotten good defaults.
In the circuit breaker section I don’t see any cbrk for safety switch?
I did not pick the racer airframe since it is not really a racer, only 2s battery and smaller motors, but now I changed but I still can’t arm since I only get the message “preflight check failed”, however I don’t know what exactly failed?
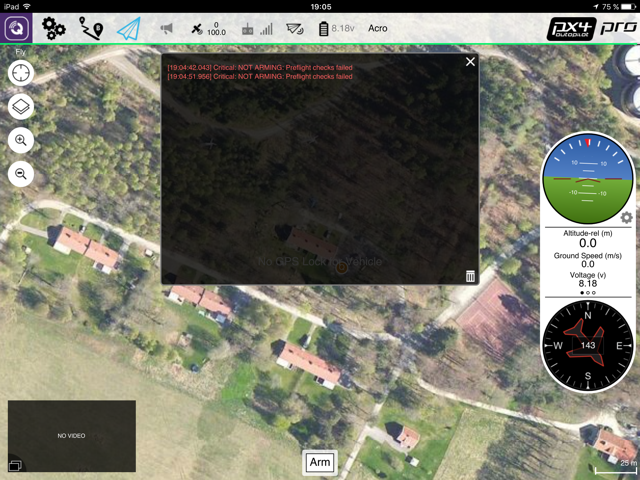
Its the circuit breaker for safety (named safety). It should be set now. As for your preflight check failure - that sounds like a good thing to debug now. You can run the check again with commander check which works with Tools/mavlink_shell.py in case you don’t have FTDI on the board (remember to disconnect QGC first).
We need in situations like these the community (you) pitching in when they have a case they can reproduce. These things are almost impossible to debug remotely.
I suspect its a supply voltage check or so failing. Check first on the console.
Yes you were right, when I changed the airframe to generic racer the number of cells changed to 3s. I created an issue for it. I also increased the pwm_min parameter to 1300 and now it flies! At least indoor, we have around 30 m/s wind here atm so will have to wait with tuning outside…